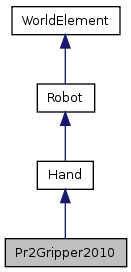
Special class only because of the hack that sets eigengrasp limits manually. More...
#include <pr2Gripper.h>
Public Types | |
| enum | ComplianceType { NONE = -1, FINGER0 = 0, FINGER1 = 1 } |
Public Member Functions | |
| void | compliantClose () |
| ComplianceType | getCompliance () const |
| Pr2Gripper2010 (World *w, const char *name) | |
| void | setCompliance (ComplianceType type) |
Protected Member Functions | |
| virtual void | setJointValuesAndUpdate (const double *jointVals) |
| Asks all chains to set the given joint values, then update the position of all links. | |
Private Attributes | |
| ComplianceType | mCompliance |
Static Private Attributes | |
| static const std::string | l_gripper_tip_name = "_chain0_link1" |
| static const std::string | r_gripper_tip_name = "_chain1_link1" |
Special class only because of the hack that sets eigengrasp limits manually.
In searchStateImpl.cpp you will find eigengrasp limits hard-coded in for different hands. This is the reason why this hand needs its own class.
Definition at line 63 of file pr2Gripper.h.
Definition at line 66 of file pr2Gripper.h.
| Pr2Gripper2010::Pr2Gripper2010 | ( | World * | w, | |
| const char * | name | |||
| ) | [inline] |
Empty constructor (placeholder)
Definition at line 78 of file pr2Gripper.h.
| void Pr2Gripper2010::compliantClose | ( | ) |
Assuming that there is an object in range of the hand, runs a reactive grasping routine which closes the hand, finds out which finger hit first, and then incrementally moves the hand and closes the gripper until both fingers make contact (in practice it stops when autograsp indicates that no movement is possible after moving the hand).
This will fail if the hand is in collision (interpenetration) with an object, or if there are multiple contacts on the hand (it is not clear what to do in that situation).
Definition at line 82 of file pr2Gripper.cpp.
| ComplianceType Pr2Gripper2010::getCompliance | ( | ) | const [inline] |
Definition at line 94 of file pr2Gripper.h.
| void Pr2Gripper2010::setCompliance | ( | ComplianceType | type | ) | [inline] |
Definition at line 93 of file pr2Gripper.h.
| void Pr2Gripper2010::setJointValuesAndUpdate | ( | const double * | jointVals | ) | [protected, virtual] |
Asks all chains to set the given joint values, then update the position of all links.
Asks the chains to set the new joint values in jointVals. It is expected that this vector is of size equal to the number of joints of this robot. Also asks the chains to also update the poses of the links.
Reimplemented from Robot.
Definition at line 68 of file pr2Gripper.cpp.
const string Pr2Gripper2010::l_gripper_tip_name = "_chain0_link1" [static, private] |
Definition at line 68 of file pr2Gripper.h.
ComplianceType Pr2Gripper2010::mCompliance [private] |
Definition at line 71 of file pr2Gripper.h.
const string Pr2Gripper2010::r_gripper_tip_name = "_chain1_link1" [static, private] |
Definition at line 69 of file pr2Gripper.h.

