#include <searchState.h>
Public Member Functions | |
| virtual transf | getCoreTran () const =0 |
| Get the transform set by the current values of the variables stored here. | |
| PositionState (const Hand *h) | |
| virtual void | setTran (const transf &t)=0 |
| Set the internal variables to match the given transform. | |
| ~PositionState () | |
Static Public Member Functions | |
| static PositionState * | createInstance (StateType type, const Hand *h) |
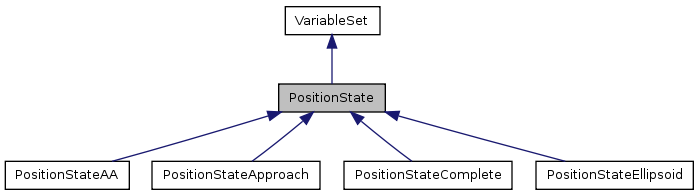
This class is a set of variables for saving wrist position and orientation. It knows how to convert its own variables into a transform that gives the wrist position. Again, there can be many ways of saving a position and orientation, so this class is also pure abstract. See searchStateImpl.h for implementations.
Definition at line 200 of file searchState.h.
| PositionState::PositionState | ( | const Hand * | h | ) | [inline] |
Definition at line 203 of file searchState.h.
| PositionState::~PositionState | ( | ) | [inline] |
Definition at line 204 of file searchState.h.
| PositionState * PositionState::createInstance | ( | StateType | type, | |
| const Hand * | h | |||
| ) | [static] |
Definition at line 336 of file searchState.cpp.
| virtual transf PositionState::getCoreTran | ( | ) | const [pure virtual] |
Get the transform set by the current values of the variables stored here.
Implemented in PositionStateComplete, PositionStateAA, PositionStateEllipsoid, and PositionStateApproach.
| virtual void PositionState::setTran | ( | const transf & | t | ) | [pure virtual] |
Set the internal variables to match the given transform.
Not all implementations have this implemented correctly.
Implemented in PositionStateComplete, PositionStateAA, PositionStateEllipsoid, and PositionStateApproach.

