#include <CameraAREngine.h>
|
| | CameraAREngine (void *env, void *context, void *activity, bool smoothing=false, float upstreamRelocalizationAccThr=0.0f) |
| |
| virtual void | close () |
| |
| virtual std::string | getSerial () const |
| |
| virtual bool | init (const std::string &calibrationFolder=".", const std::string &cameraName="") |
| |
| virtual void | setScreenRotationAndSize (ScreenRotation colorCameraToDisplayRotation, int width, int height) |
| |
| virtual | ~CameraAREngine () |
| |
| void | addEnvSensor (int type, float value) |
| |
| | CameraMobile (bool smoothing=false, float upstreamRelocalizationAccThr=0.0f) |
| |
| const CameraModel & | getCameraModel () const |
| |
| const Transform & | getDeviceTColorCamera () const |
| |
| const cv::Mat & | getOcclusionImage (CameraModel *model=0) const |
| |
| virtual bool | getPose (double epochStamp, Transform &pose, cv::Mat &covariance, double maxWaitTime=0.06) |
| |
| ScreenRotation | getScreenRotation () const |
| |
| double | getStampEpochOffset () const |
| |
| GLuint | getTextureId () |
| |
| void | getVPMatrices (glm::mat4 &view, glm::mat4 &projection) const |
| |
| virtual bool | isCalibrated () const |
| |
| virtual bool | odomProvided () const |
| |
| void | poseReceived (const Transform &pose, double deviceStamp) |
| |
| void | resetOrigin (const rtabmap::Transform &offset=rtabmap::Transform()) |
| |
| void | setGPS (const GPS &gps) |
| |
| void | setOcclusionImage (const cv::Mat &image, const CameraModel &model) |
| |
| void | setSmoothing (bool enabled) |
| |
| void | update (const SensorData &data, const Transform &pose, const glm::mat4 &viewMatrix, const glm::mat4 &projectionMatrix, const float *texCoord) |
| |
| void | updateOnRender () |
| |
| bool | uvsInitialized () const |
| |
| const float * | uvsTransformed () const |
| |
| virtual | ~CameraMobile () |
| |
| float | getImageRate () const |
| |
| bool | initFromFile (const std::string &calibrationPath) |
| |
| bool | isInterIMUPublishing () const |
| |
| void | setImageRate (float imageRate) |
| |
| void | setInterIMUPublishing (bool enabled, IMUFilter *filter=0) |
| |
| SensorData | takeImage (SensorCaptureInfo *info=0) |
| |
| virtual | ~Camera () |
| |
| float | getFrameRate () const |
| |
| const Transform & | getLocalTransform () const |
| |
| void | resetTimer () |
| |
| void | setFrameRate (float frameRate) |
| |
| void | setLocalTransform (const Transform &localTransform) |
| |
| SensorData | takeData (SensorCaptureInfo *info=0) |
| |
| virtual | ~SensorCapture () |
| |
| | UEventsSender () |
| |
| virtual | ~UEventsSender () |
| |
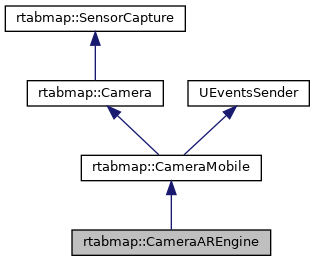
Definition at line 47 of file CameraAREngine.h.
◆ CameraAREngine()
| rtabmap::CameraAREngine::CameraAREngine |
( |
void * |
env, |
|
|
void * |
context, |
|
|
void * |
activity, |
|
|
bool |
smoothing = false, |
|
|
float |
upstreamRelocalizationAccThr = 0.0f |
|
) |
| |
◆ ~CameraAREngine()
| rtabmap::CameraAREngine::~CameraAREngine |
( |
| ) |
|
|
virtual |
◆ close()
| void rtabmap::CameraAREngine::close |
( |
| ) |
|
|
virtual |
◆ getPoseAtTimestamp()
◆ getSerial()
| std::string rtabmap::CameraAREngine::getSerial |
( |
| ) |
const |
|
virtual |
◆ init()
| bool rtabmap::CameraAREngine::init |
( |
const std::string & |
calibrationFolder = ".", |
|
|
const std::string & |
cameraName = "" |
|
) |
| |
|
virtual |
◆ setScreenRotationAndSize()
| void rtabmap::CameraAREngine::setScreenRotationAndSize |
( |
ScreenRotation |
colorCameraToDisplayRotation, |
|
|
int |
width, |
|
|
int |
height |
|
) |
| |
|
virtual |
◆ updateDataOnRender()
◆ activity_
| void* rtabmap::CameraAREngine::activity_ |
|
private |
◆ arCameraIntrinsics_
| HwArCameraIntrinsics* rtabmap::CameraAREngine::arCameraIntrinsics_ = nullptr |
|
private |
◆ arConfig_
| HwArConfig* rtabmap::CameraAREngine::arConfig_ = nullptr |
|
private |
◆ arFrame_
| HwArFrame* rtabmap::CameraAREngine::arFrame_ = nullptr |
|
private |
◆ arInstallRequested_
| bool rtabmap::CameraAREngine::arInstallRequested_ |
|
private |
◆ arPose_
| HwArPose* rtabmap::CameraAREngine::arPose_ = nullptr |
|
private |
◆ arSession_
| HwArSession* rtabmap::CameraAREngine::arSession_ = nullptr |
|
private |
◆ arSessionMutex_
| UMutex rtabmap::CameraAREngine::arSessionMutex_ |
|
private |
◆ context_
| void* rtabmap::CameraAREngine::context_ |
|
private |
◆ env_
| void* rtabmap::CameraAREngine::env_ |
|
private |
The documentation for this class was generated from the following files:
 Public Member Functions inherited from rtabmap::CameraMobile
Public Member Functions inherited from rtabmap::CameraMobile