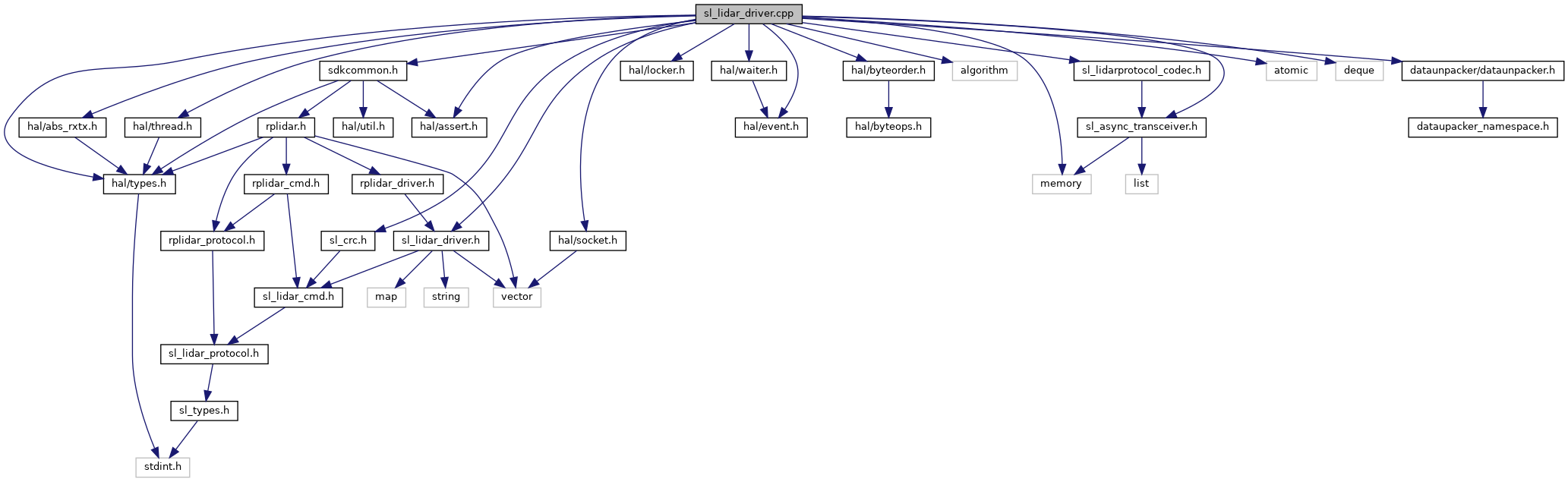
#include "sdkcommon.h"#include "hal/abs_rxtx.h"#include "hal/thread.h"#include "hal/types.h"#include "hal/assert.h"#include "hal/locker.h"#include "hal/socket.h"#include "hal/event.h"#include "hal/waiter.h"#include "hal/byteorder.h"#include "sl_lidar_driver.h"#include "sl_crc.h"#include <algorithm>#include <memory>#include <atomic>#include <deque>#include "dataunpacker/dataunpacker.h"#include "sl_async_transceiver.h"#include "sl_lidarprotocol_codec.h"
Include dependency graph for sl_lidar_driver.cpp:
Go to the source code of this file.
Classes | |
| class | sl::RawSampleNodeHolder< T > |
| class | sl::ScanDataHolder< T > |
| class | sl::SlamtecLidarDriver |
Namespaces | |
| sl | |
Functions | |
| template<class TNode > | |
| static bool | sl::angleLessThan (const TNode &a, const TNode &b) |
| template<class TNode > | |
| static sl_result | sl::ascendScanData_ (TNode *nodebuffer, size_t count) |
| static void | sl::convert (const sl_lidar_response_measurement_node_hq_t &from, sl_lidar_response_measurement_node_t &to) |
| static void | sl::convert (const sl_lidar_response_measurement_node_t &from, sl_lidar_response_measurement_node_hq_t &to) |
| Result< ILidarDriver * > | sl::createLidarDriver () |
| static float | sl::getAngle (const sl_lidar_response_measurement_node_hq_t &node) |
| static float | sl::getAngle (const sl_lidar_response_measurement_node_t &node) |
| static sl_u32 | sl::getDistanceQ2 (const sl_lidar_response_measurement_node_hq_t &node) |
| static sl_u16 | sl::getDistanceQ2 (const sl_lidar_response_measurement_node_t &node) |
| static void | sl::printDeprecationWarn (const char *fn, const char *replacement) |
| static void | sl::setAngle (sl_lidar_response_measurement_node_hq_t &node, float v) |
| static void | sl::setAngle (sl_lidar_response_measurement_node_t &node, float v) |