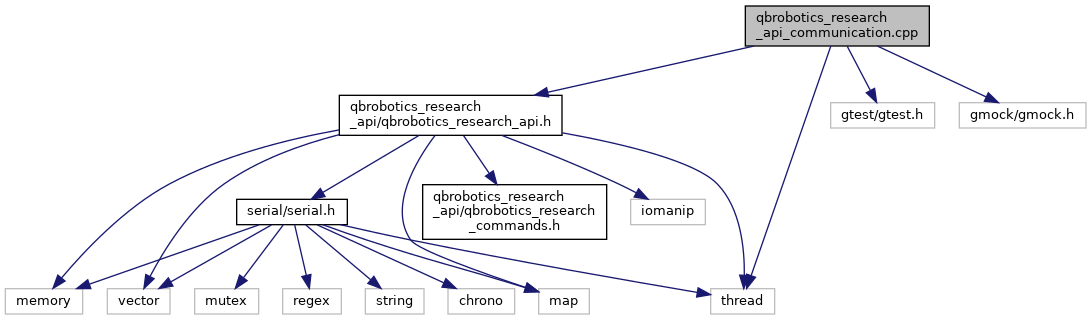
#include <qbrobotics_research_api/qbrobotics_research_api.h>
#include <gtest/gtest.h>
#include <gmock/gmock.h>
#include <thread>
Go to the source code of this file.
|
| int | main (int argc, char **argv) |
| |
| | qbrobotics_research_api::internal::TEST (CommunicationInternal, SwapEndians) |
| |
| | qbrobotics_research_api::TEST_F (Communication, ControlReferences) |
| |
| | qbrobotics_research_api::TEST_F (Communication, DefaultParams) |
| |
| | qbrobotics_research_api::TEST_F (Communication, GetInfo) |
| |
| | qbrobotics_research_api::TEST_F (Communication, ListSerialPorts) |
| |
| | qbrobotics_research_api::TEST_F (Communication, MotorState) |
| |
| | qbrobotics_research_api::TEST_F (Communication, Ping) |
| |
| | qbrobotics_research_api::TEST_F (Communication, RestoreParams) |
| |
| | qbrobotics_research_api::TEST_F (Communication, SensorMeasurements) |
| |
| | qbrobotics_research_api::TEST_F (Communication, SetParameters) |
| |
◆ main()
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |