#include <rosflight_io.h>
Public Member Functions | |
| virtual void | handle_mavlink_message (const mavlink_message_t &msg) |
| The handler function for mavlink messages to be implemented by derived classes. More... | |
| virtual void | on_new_param_received (std::string name, double value) |
| Called when a parameter is received from the autopilot for the first time. More... | |
| virtual void | on_param_value_updated (std::string name, double value) |
| Called when an updated value is received for a parameter. More... | |
| virtual void | on_params_saved_change (bool unsaved_changes) |
| Called when the status of whether there are unsaved parameters changes. More... | |
| rosflightIO () | |
| ~rosflightIO () | |
Static Public Attributes | |
| static constexpr float | HEARTBEAT_PERIOD = 1 |
Private Member Functions | |
| void | attitudeCorrectionCallback (geometry_msgs::Quaternion::ConstPtr msg) |
| bool | calibrateAirspeedSrvCallback (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| bool | calibrateBaroSrvCallback (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| bool | calibrateImuBiasSrvCallback (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| bool | calibrateRCTrimSrvCallback (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| void | check_error_code (uint8_t current, uint8_t previous, ROSFLIGHT_ERROR_CODE code, std::string name) |
| void | commandCallback (rosflight_msgs::Command::ConstPtr msg) |
| void | handle_attitude_quaternion_msg (const mavlink_message_t &msg) |
| void | handle_command_ack_msg (const mavlink_message_t &msg) |
| void | handle_diff_pressure_msg (const mavlink_message_t &msg) |
| void | handle_hard_error_msg (const mavlink_message_t &msg) |
| void | handle_heartbeat_msg (const mavlink_message_t &msg) |
| void | handle_named_command_struct_msg (const mavlink_message_t &msg) |
| void | handle_named_value_float_msg (const mavlink_message_t &msg) |
| void | handle_named_value_int_msg (const mavlink_message_t &msg) |
| void | handle_rc_channels_raw_msg (const mavlink_message_t &msg) |
| void | handle_rosflight_gnss_msg (const mavlink_message_t &msg) |
| void | handle_rosflight_gnss_raw_msg (const mavlink_message_t &msg) |
| void | handle_rosflight_output_raw_msg (const mavlink_message_t &msg) |
| void | handle_small_baro_msg (const mavlink_message_t &msg) |
| void | handle_small_imu_msg (const mavlink_message_t &msg) |
| void | handle_small_mag_msg (const mavlink_message_t &msg) |
| void | handle_small_range_msg (const mavlink_message_t &msg) |
| void | handle_status_msg (const mavlink_message_t &msg) |
| void | handle_statustext_msg (const mavlink_message_t &msg) |
| void | handle_version_msg (const mavlink_message_t &msg) |
| void | heartbeatTimerCallback (const ros::TimerEvent &e) |
| bool | paramGetSrvCallback (rosflight_msgs::ParamGet::Request &req, rosflight_msgs::ParamGet::Response &res) |
| bool | paramLoadFromFileCallback (rosflight_msgs::ParamFile::Request &req, rosflight_msgs::ParamFile::Response &res) |
| bool | paramSaveToFileCallback (rosflight_msgs::ParamFile::Request &req, rosflight_msgs::ParamFile::Response &res) |
| bool | paramSetSrvCallback (rosflight_msgs::ParamSet::Request &req, rosflight_msgs::ParamSet::Response &res) |
| void | paramTimerCallback (const ros::TimerEvent &e) |
| bool | paramWriteSrvCallback (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| bool | rebootSrvCallback (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| bool | rebootToBootloaderSrvCallback (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| void | request_version () |
| template<class T > | |
| T | saturate (T value, T min, T max) |
| void | send_heartbeat () |
| void | versionTimerCallback (const ros::TimerEvent &e) |
Detailed Description
Definition at line 88 of file rosflight_io.h.
Constructor & Destructor Documentation
| rosflight_io::rosflightIO::rosflightIO | ( | ) |
- Todo:
- move this into the MavROSflight constructor
Definition at line 50 of file rosflight_io.cpp.
| rosflight_io::rosflightIO::~rosflightIO | ( | ) |
Definition at line 132 of file rosflight_io.cpp.
Member Function Documentation
|
private |
Definition at line 864 of file rosflight_io.cpp.
|
private |
Definition at line 974 of file rosflight_io.cpp.
|
private |
Definition at line 983 of file rosflight_io.cpp.
|
private |
Definition at line 906 of file rosflight_io.cpp.
|
private |
Definition at line 916 of file rosflight_io.cpp.
|
private |
Definition at line 963 of file rosflight_io.cpp.
|
private |
- Todo:
- these are hard-coded to match right now; may want to replace with something more robust
Definition at line 832 of file rosflight_io.cpp.
|
private |
Definition at line 382 of file rosflight_io.cpp.
|
private |
Definition at line 336 of file rosflight_io.cpp.
|
private |
Definition at line 495 of file rosflight_io.cpp.
|
private |
Definition at line 701 of file rosflight_io.cpp.
|
private |
Definition at line 235 of file rosflight_io.cpp.
|
virtual |
The handler function for mavlink messages to be implemented by derived classes.
- Parameters
-
msg The mavlink message to handle
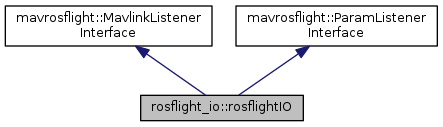
Implements mavrosflight::MavlinkListenerInterface.
Definition at line 138 of file rosflight_io.cpp.
|
private |
Definition at line 564 of file rosflight_io.cpp.
|
private |
Definition at line 541 of file rosflight_io.cpp.
|
private |
Definition at line 518 of file rosflight_io.cpp.
|
private |
Definition at line 471 of file rosflight_io.cpp.
|
private |
Definition at line 721 of file rosflight_io.cpp.
|
private |
Definition at line 794 of file rosflight_io.cpp.
|
private |
Definition at line 452 of file rosflight_io.cpp.
|
private |
Definition at line 599 of file rosflight_io.cpp.
|
private |
Definition at line 418 of file rosflight_io.cpp.
|
private |
- Todo:
- calibration, correct units, floating point message type
Definition at line 623 of file rosflight_io.cpp.
|
private |
Definition at line 644 of file rosflight_io.cpp.
|
private |
Definition at line 240 of file rosflight_io.cpp.
|
private |
Definition at line 351 of file rosflight_io.cpp.
|
private |
Definition at line 682 of file rosflight_io.cpp.
|
private |
Definition at line 945 of file rosflight_io.cpp.
|
virtual |
Called when a parameter is received from the autopilot for the first time.
- Parameters
-
name The name of the parameter value The value of the parameter
Implements mavrosflight::ParamListenerInterface.
Definition at line 209 of file rosflight_io.cpp.
|
virtual |
Called when an updated value is received for a parameter.
- Parameters
-
name The name of the parameter value The updated value of the parameter
Implements mavrosflight::ParamListenerInterface.
Definition at line 214 of file rosflight_io.cpp.
|
virtual |
Called when the status of whether there are unsaved parameters changes.
- Parameters
-
unsaved_changes True if there are parameters that have been set but not saved on the autopilot
Implements mavrosflight::ParamListenerInterface.
Definition at line 219 of file rosflight_io.cpp.
|
private |
Definition at line 871 of file rosflight_io.cpp.
|
private |
Definition at line 900 of file rosflight_io.cpp.
|
private |
Definition at line 894 of file rosflight_io.cpp.
|
private |
Definition at line 877 of file rosflight_io.cpp.
|
private |
Definition at line 925 of file rosflight_io.cpp.
|
private |
Definition at line 883 of file rosflight_io.cpp.
|
private |
Definition at line 992 of file rosflight_io.cpp.
|
private |
Definition at line 1001 of file rosflight_io.cpp.
|
private |
Definition at line 950 of file rosflight_io.cpp.
|
inlineprivate |
Definition at line 154 of file rosflight_io.h.
|
private |
Definition at line 956 of file rosflight_io.cpp.
|
private |
Definition at line 940 of file rosflight_io.cpp.
Member Data Documentation
|
private |
Definition at line 180 of file rosflight_io.h.
|
private |
Definition at line 207 of file rosflight_io.h.
|
private |
Definition at line 163 of file rosflight_io.h.
|
private |
Definition at line 172 of file rosflight_io.h.
|
private |
Definition at line 199 of file rosflight_io.h.
|
private |
Definition at line 198 of file rosflight_io.h.
|
private |
Definition at line 197 of file rosflight_io.h.
|
private |
Definition at line 162 of file rosflight_io.h.
|
private |
Definition at line 170 of file rosflight_io.h.
|
private |
Definition at line 185 of file rosflight_io.h.
|
private |
Definition at line 181 of file rosflight_io.h.
|
private |
Definition at line 210 of file rosflight_io.h.
|
private |
Definition at line 174 of file rosflight_io.h.
|
private |
Definition at line 175 of file rosflight_io.h.
|
static |
Definition at line 102 of file rosflight_io.h.
|
private |
Definition at line 205 of file rosflight_io.h.
|
private |
Definition at line 195 of file rosflight_io.h.
|
private |
Definition at line 196 of file rosflight_io.h.
|
private |
Definition at line 166 of file rosflight_io.h.
|
private |
Definition at line 167 of file rosflight_io.h.
|
private |
Definition at line 184 of file rosflight_io.h.
|
private |
Definition at line 179 of file rosflight_io.h.
|
private |
Definition at line 212 of file rosflight_io.h.
|
private |
Definition at line 213 of file rosflight_io.h.
|
private |
Definition at line 188 of file rosflight_io.h.
|
private |
Definition at line 187 of file rosflight_io.h.
|
private |
Definition at line 186 of file rosflight_io.h.
|
private |
Definition at line 176 of file rosflight_io.h.
|
private |
Definition at line 160 of file rosflight_io.h.
|
private |
Definition at line 168 of file rosflight_io.h.
|
private |
Definition at line 190 of file rosflight_io.h.
|
private |
Definition at line 194 of file rosflight_io.h.
|
private |
Definition at line 193 of file rosflight_io.h.
|
private |
Definition at line 191 of file rosflight_io.h.
|
private |
Definition at line 203 of file rosflight_io.h.
|
private |
Definition at line 192 of file rosflight_io.h.
|
private |
Definition at line 208 of file rosflight_io.h.
|
private |
Definition at line 169 of file rosflight_io.h.
|
private |
Definition at line 201 of file rosflight_io.h.
|
private |
Definition at line 200 of file rosflight_io.h.
|
private |
Definition at line 173 of file rosflight_io.h.
|
private |
Definition at line 182 of file rosflight_io.h.
|
private |
Definition at line 171 of file rosflight_io.h.
|
private |
Definition at line 178 of file rosflight_io.h.
|
private |
Definition at line 177 of file rosflight_io.h.
|
private |
Definition at line 165 of file rosflight_io.h.
|
private |
Definition at line 183 of file rosflight_io.h.
|
private |
Definition at line 204 of file rosflight_io.h.
The documentation for this class was generated from the following files: