#include <mocks.h>
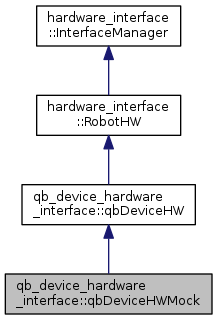
Inheritance diagram for qb_device_hardware_interface::qbDeviceHWMock:
Public Member Functions | |
| MOCK_METHOD0 (activate, int()) | |
| MOCK_METHOD0 (close, int()) | |
| MOCK_METHOD0 (deactivate, int()) | |
| MOCK_METHOD0 (getInfo, std::string()) | |
| MOCK_METHOD0 (isActive, bool()) | |
| MOCK_METHOD0 (isOpen, bool()) | |
| MOCK_METHOD0 (open, int()) | |
| MOCK_METHOD0 (retrieveSerialPort, int()) | |
| MOCK_METHOD1 (open, int(const std::string &serial_port)) | |
| MOCK_METHOD1 (set, int(const std::vector< double > &commands)) | |
| MOCK_METHOD2 (get, int(std::vector< double > &positions, std::vector< double > ¤ts)) | |
| MOCK_METHOD2 (retrieveDeviceParameters, int(std::vector< int > &limits, std::vector< int > &resolutions)) | |
| qbDeviceHWMock (qb_device_driver::qbDeviceAPIPtr api_mock) | |
| int | realActivate () |
| int | realClose () |
| int | realDeactivate () |
| int | realGet (std::vector< double > &positions, std::vector< double > ¤ts) |
| std::string | realGetInfo () |
| bool | realIsActive () |
| bool | realIsOpen () |
| int | realOpen () |
| int | realOpen (const std::string &serial_port) |
| int | realRetrieveDeviceParameters (std::vector< int > &limits, std::vector< int > &resolutions) |
| int | realRetrieveSerialPort () |
| int | realSet (const std::vector< double > &commands) |
 Public Member Functions inherited from qb_device_hardware_interface::qbDeviceHW Public Member Functions inherited from qb_device_hardware_interface::qbDeviceHW | |
| int | getDeviceId () |
| std::string | getDeviceNamespace () |
| virtual std::vector< std::string > | getJoints ()=0 |
| This pure virtual method has to be redefined by derived classes to return the controlled joint names vector. More... | |
| bool | init (ros::NodeHandle &root_nh, ros::NodeHandle &robot_hw_nh) override |
| The init function is called to initialize the RobotHW from a non-realtime thread. More... | |
| qbDeviceHW (qb_device_transmission_interface::TransmissionPtr transmission, const std::vector< std::string > &actuators, const std::vector< std::string > &joints) | |
| Initialize HW resources and interfaces, and wait until it is initialized from the Communication Handler. More... | |
| void | read (const ros::Time &time, const ros::Duration &period) override |
Read actuator state from the hardware, propagate it to joint states and publish the whole device state to a namespaced "~state" topic (each instance of qbDeviceHW should publish on its own topic). More... | |
| void | write (const ros::Time &time, const ros::Duration &period) override |
| Enforce joint limits for all registered joint limit interfaces, propagate joint commands to actuators, and send actuator commands to the hardware. More... | |
| ~qbDeviceHW () override | |
| Deactivate motors and stop the async spinner. More... | |
| Public Member Functions inherited from hardware_interface::RobotHW | |
| virtual bool | checkForConflict (const std::list< ControllerInfo > &info) const |
| virtual bool | checkForConflict (const std::list< ControllerInfo > &info) const |
| virtual void | doSwitch (const std::list< ControllerInfo > &, const std::list< ControllerInfo > &) |
| virtual void | doSwitch (const std::list< ControllerInfo > &, const std::list< ControllerInfo > &) |
| virtual bool | prepareSwitch (const std::list< ControllerInfo > &start_list, const std::list< ControllerInfo > &stop_list) |
| virtual bool | prepareSwitch (const std::list< ControllerInfo > &start_list, const std::list< ControllerInfo > &stop_list) |
| RobotHW () | |
| virtual | ~RobotHW () |
| Public Member Functions inherited from hardware_interface::InterfaceManager | |
| T * | get () |
| std::vector< std::string > | getInterfaceResources (std::string iface_type) const |
| std::vector< std::string > | getNames () const |
| void | registerInterface (T *iface) |
| void | registerInterfaceManager (InterfaceManager *iface_man) |
Additional Inherited Members | |
| Protected Types inherited from hardware_interface::InterfaceManager | |
| typedef std::vector< InterfaceManager * > | InterfaceManagerVector |
| typedef std::map< std::string, void * > | InterfaceMap |
| typedef std::map< std::string, std::vector< std::string > > | ResourceMap |
| typedef std::map< std::string, size_t > | SizeMap |
| Protected Member Functions inherited from qb_device_hardware_interface::qbDeviceHW | |
| virtual int | activateMotors () |
| Call the service to activate the device motors and wait for the response. More... | |
| virtual int | deactivateMotors () |
| Call the service to deactivate the device motors and wait for the response. More... | |
| virtual std::string | getInfo () |
| Call the service to retrieve the printable configuration setup of the device and wait for the response. More... | |
| virtual int | getMeasurements (std::vector< double > &positions, std::vector< double > ¤ts, ros::Time &stamp) |
| Call the service to retrieve device measurements (both positions and currents) and wait for the response. More... | |
| virtual int | initializeDevice () |
| Call the service to initialize the device with parameters from the Communication Handler and wait for the response. More... | |
| virtual int | setCommands (const std::vector< double > &commands) |
| Call the service to send reference commands to the device and wait for the response. More... | |
| Protected Attributes inherited from qb_device_hardware_interface::qbDeviceHW | |
| qb_device_hardware_interface::qbDeviceHWResources | actuators_ |
| qb_device_hardware_interface::qbDeviceResources | device_ |
| qb_device_msgs::Info | device_info_ |
| qb_device_hardware_interface::qbDeviceHWInterfaces | interfaces_ |
| qb_device_joint_limits_interface::qbDeviceJointLimitsResources | joint_limits_ |
| qb_device_hardware_interface::qbDeviceHWResources | joints_ |
| ros::NodeHandle | node_handle_ |
| std::map< std::string, ros::ServiceClient > | services_ |
| ros::AsyncSpinner | spinner_ |
| ros::Publisher | state_publisher_ |
| qb_device_transmission_interface::qbDeviceTransmissionResources | transmission_ |
| urdf::Model | urdf_model_ |
| bool | use_simulator_mode_ |
| Protected Attributes inherited from hardware_interface::InterfaceManager | |
| boost::ptr_vector< ResourceManagerBase > | interface_destruction_list_ |
| InterfaceManagerVector | interface_managers_ |
| InterfaceMap | interfaces_ |
| InterfaceMap | interfaces_combo_ |
| SizeMap | num_ifaces_registered_ |
| ResourceMap | resources_ |
Detailed Description
Constructor & Destructor Documentation
|
inline |
Member Function Documentation
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD0 | ( | activate | , |
| int() | |||
| ) |
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD0 | ( | close | , |
| int() | |||
| ) |
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD0 | ( | deactivate | , |
| int() | |||
| ) |
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD0 | ( | getInfo | , |
| std::string() | |||
| ) |
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD0 | ( | isActive | , |
| bool() | |||
| ) |
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD0 | ( | isOpen | , |
| bool() | |||
| ) |
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD0 | ( | open | , |
| int() | |||
| ) |
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD0 | ( | retrieveSerialPort | , |
| int() | |||
| ) |
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD1 | ( | open | , |
| int(const std::string &serial_port) | |||
| ) |
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD1 | ( | set | , |
| int(const std::vector< double > &commands) | |||
| ) |
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD2 | ( | get | , |
| int(std::vector< double > &positions, std::vector< double > ¤ts) | |||
| ) |
| qb_device_hardware_interface::qbDeviceHWMock::MOCK_METHOD2 | ( | retrieveDeviceParameters | , |
| int(std::vector< int > &limits, std::vector< int > &resolutions) | |||
| ) |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
The documentation for this class was generated from the following file: