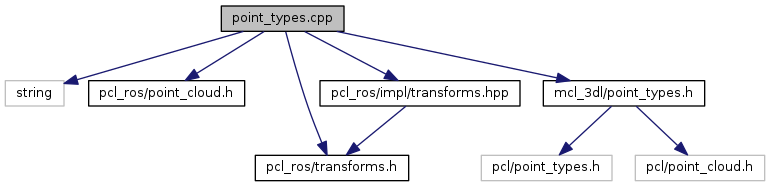
#include <string>#include <pcl_ros/point_cloud.h>#include <pcl_ros/transforms.h>#include <pcl_ros/impl/transforms.hpp>#include <mcl_3dl/point_types.h>
Include dependency graph for point_types.cpp:
Go to the source code of this file.
Functions | |
| template bool | pcl_ros::transformPointCloud< mcl_3dl::PointXYZIL > (const std::string &, const ros::Time &, const pcl::PointCloud< mcl_3dl::PointXYZIL > &, const std::string &, pcl::PointCloud< mcl_3dl::PointXYZIL > &, const tf::TransformListener &) |
| template bool | pcl_ros::transformPointCloud< mcl_3dl::PointXYZIL > (const std::string &, const pcl::PointCloud< mcl_3dl::PointXYZIL > &, pcl::PointCloud< mcl_3dl::PointXYZIL > &, const tf::TransformListener &) |
Function Documentation
| template bool pcl_ros::transformPointCloud< mcl_3dl::PointXYZIL > | ( | const std::string & | , |
| const ros::Time & | , | ||
| const pcl::PointCloud< mcl_3dl::PointXYZIL > & | , | ||
| const std::string & | , | ||
| pcl::PointCloud< mcl_3dl::PointXYZIL > & | , | ||
| const tf::TransformListener & | |||
| ) |
| template bool pcl_ros::transformPointCloud< mcl_3dl::PointXYZIL > | ( | const std::string & | , |
| const pcl::PointCloud< mcl_3dl::PointXYZIL > & | , | ||
| pcl::PointCloud< mcl_3dl::PointXYZIL > & | , | ||
| const tf::TransformListener & | |||
| ) |