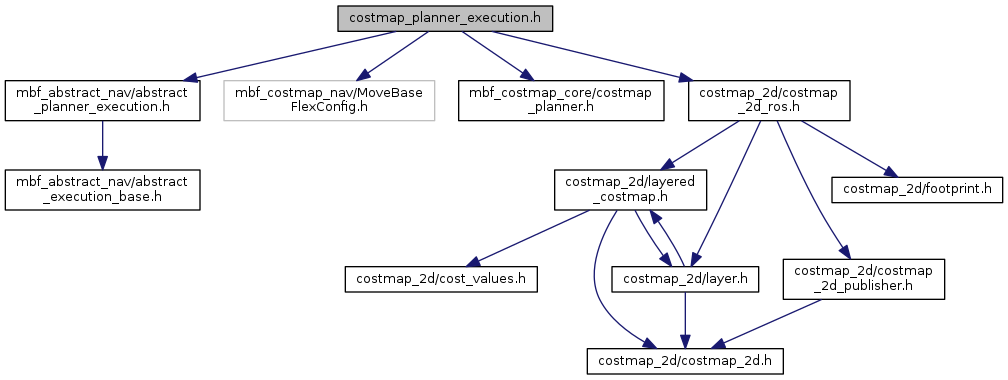
#include <mbf_abstract_nav/abstract_planner_execution.h>#include <mbf_costmap_nav/MoveBaseFlexConfig.h>#include <mbf_costmap_core/costmap_planner.h>#include <costmap_2d/costmap_2d_ros.h>
Include dependency graph for costmap_planner_execution.h:
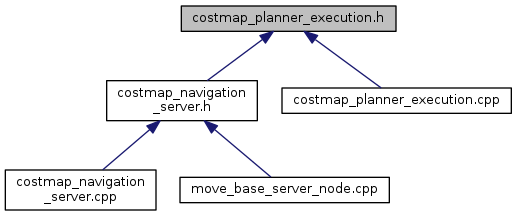
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mbf_costmap_nav::CostmapPlannerExecution |
| The CostmapPlannerExecution binds a global costmap to the AbstractPlannerExecution and uses the nav_core/BaseCostmapPlanner class as base plugin interface. This class makes move_base_flex compatible to the old move_base. More... | |
Namespaces | |
| mbf_costmap_nav | |