Initialisation of differents robot class.
More...
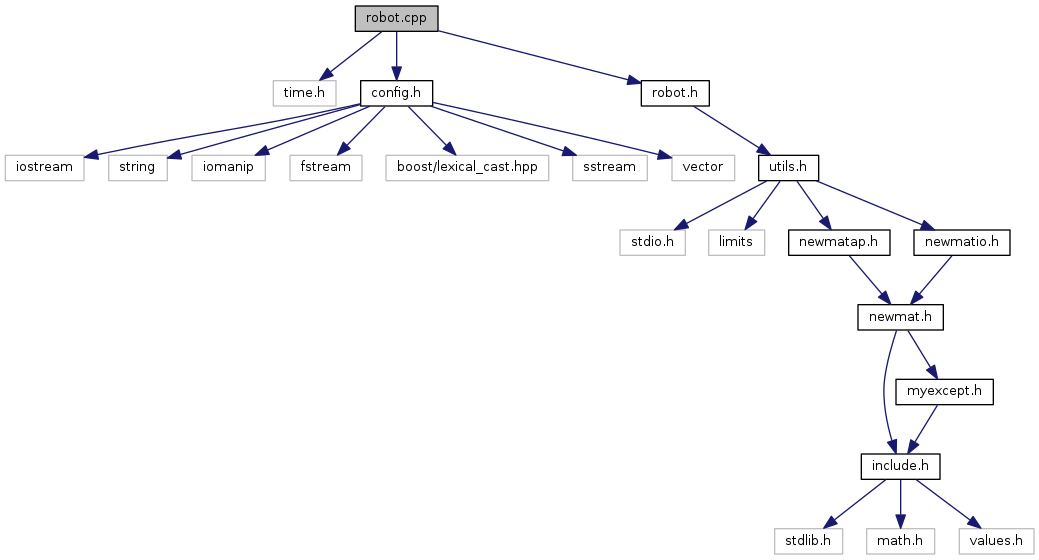
#include <time.h>
#include "config.h"
#include "robot.h"
Go to the source code of this file.
|
| Real | fourbyfourident [] = {1.0,0.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,0.0,1.0} |
| | Used to initialize a  matrix. More... matrix. More...
|
| |
| static const char | rcsid [] = "$Id: robot.cpp,v 1.50 2006/05/16 19:24:26 gourdeau Exp $" |
| | RCS/CVS version. More...
|
| |
| Real | threebythreeident [] ={1.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,1.0} |
| | Used to initialize a  matrix. More... matrix. More...
|
| |
Initialisation of differents robot class.
Definition in file robot.cpp.
| void perturb_robot |
( |
Robot_basic & |
robot, |
|
|
const double |
f |
|
) |
| |
Modify a robot.
- Parameters
-
| robot | Robot_basic reference. |
| f | Percentage of erreur between 0 and 1. |
f represents an error to added on the robot inertial parameter. f is between 0 (no error) and 1 (100% error).
Definition at line 1446 of file robot.cpp.
Return true if the robot is like a Puma on DH notation.
Compare the robot DH table with the Puma DH table. The function return true if the tables are similar (same alpha and similar a and d parameters).
Definition at line 1516 of file robot.cpp.
Return true if the robot is like a Puma on modified DH notation.
Compare the robot DH table with the Puma DH table. The function return true if the tables are similar (same alpha and similar a and d parameters).
Definition at line 1615 of file robot.cpp.
Return true if the robot is like a Rhino on DH notation.
Compare the robot DH table with the Puma DH table. The function return true if the tables are similar (same alpha and similar a and d parameters).
Definition at line 1483 of file robot.cpp.
Return true if the robot is like a Rhino on modified DH notation.
Compare the robot DH table with the Puma DH table. The function return true if the tables are similar (same alpha and similar a and d parameters).
Definition at line 1583 of file robot.cpp.
Return true if the robot is like a Schilling on DH notation.
Compare the robot DH table with the Schilling DH table. The function return true if the tables are similar (same alpha and similar a and d parameters).
Definition at line 1549 of file robot.cpp.
Return true if the robot is like a Schilling on modified DH notation.
Compare the robot DH table with the Schilling DH table. The function return true if the tables are similar (same alpha and similar a and d parameters).
Definition at line 1649 of file robot.cpp.
| Real fourbyfourident[] = {1.0,0.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,0.0,1.0} |
Used to initialize a matrix.
Definition at line 133 of file robot.cpp.
| const char rcsid[] = "$Id: robot.cpp,v 1.50 2006/05/16 19:24:26 gourdeau Exp $" |
|
static |
| Real threebythreeident[] ={1.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,1.0} |
Used to initialize a matrix.
Definition at line 136 of file robot.cpp.