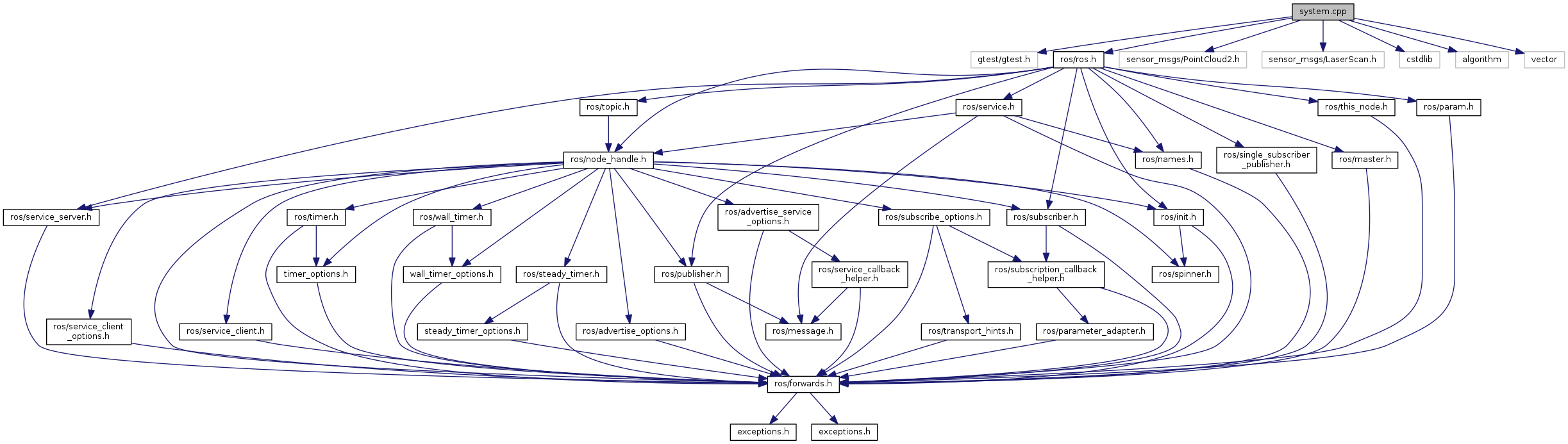
#include <gtest/gtest.h>
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
#include <sensor_msgs/LaserScan.h>
#include <cstdlib>
#include <algorithm>
#include <vector>
Go to the source code of this file.
|
| size_t | findClosestIndex (const PointCloud &cloud, uint16_t ring, float x, float y) |
| |
| int | main (int argc, char **argv) |
| |
| void | publishNone () |
| |
| void | publishR (const PointCloud &cloud) |
| |
| void | publishXYZ (const PointCloud &cloud) |
| |
| void | publishXYZIR1 (const PointCloud &cloud) |
| |
| void | publishXYZIR2 (const PointCloud &cloud) |
| |
| void | publishXYZR (const PointCloud &cloud) |
| |
| void | publishXYZR32 (const PointCloud &cloud) |
| |
| void | recv (const sensor_msgs::LaserScanConstPtr &msg) |
| |
| static ros::Time | rosTime (const ros::WallTime &stamp) |
| |
| static float | SQUARE (float x) |
| |
| | TEST (System, missing_fields) |
| |
| | TEST (System, empty_data) |
| |
| | TEST (System, random_data_sparse) |
| |
| | TEST (System, random_data_dense) |
| |
| void | verifyScanDense (const PointCloud &cloud, uint16_t ring, bool intensity=true) |
| |
| void | verifyScanEmpty (const PointCloud &cloud, bool intensity=true) |
| |
| void | verifyScanSparse (const PointCloud &cloud, uint16_t ring, uint16_t ring_count, bool intensity=true) |
| |
| bool | waitForScan (ros::WallDuration dur) |
| |
| size_t findClosestIndex |
( |
const PointCloud & |
cloud, |
|
|
uint16_t |
ring, |
|
|
float |
x, |
|
|
float |
y |
|
) |
| |
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |
| void recv |
( |
const sensor_msgs::LaserScanConstPtr & |
msg | ) |
|
| static float SQUARE |
( |
float |
x | ) |
|
|
inlinestatic |
| TEST |
( |
System |
, |
|
|
missing_fields |
|
|
) |
| |
| TEST |
( |
System |
, |
|
|
empty_data |
|
|
) |
| |
| TEST |
( |
System |
, |
|
|
random_data_sparse |
|
|
) |
| |
| TEST |
( |
System |
, |
|
|
random_data_dense |
|
|
) |
| |
| void verifyScanDense |
( |
const PointCloud & |
cloud, |
|
|
uint16_t |
ring, |
|
|
bool |
intensity = true |
|
) |
| |
| void verifyScanEmpty |
( |
const PointCloud & |
cloud, |
|
|
bool |
intensity = true |
|
) |
| |
| void verifyScanSparse |
( |
const PointCloud & |
cloud, |
|
|
uint16_t |
ring, |
|
|
uint16_t |
ring_count, |
|
|
bool |
intensity = true |
|
) |
| |
| sensor_msgs::LaserScan g_scan |
| volatile bool g_scan_new = false |