#include <HydrodynamicModel.hh>
Public Member Functions | |
| virtual void | ApplyHydrodynamicForces (double time, const ignition::math::Vector3d &_flowVelWorld)=0 |
| Computation of the hydrodynamic forces. More... | |
| virtual bool | GetParam (std::string _tag, std::vector< double > &_output)=0 |
| Return paramater in vector form for the given tag. More... | |
| virtual bool | GetParam (std::string _tag, double &_output)=0 |
| Return paramater in vector form for the given tag. More... | |
| virtual std::string | GetType ()=0 |
| Returns type of model. More... | |
| virtual void | Print (std::string _paramName, std::string _message=std::string())=0 |
| Prints parameters. More... | |
| virtual bool | SetParam (std::string _tag, double _input)=0 |
| Set a scalar parameters. More... | |
 Public Member Functions inherited from gazebo::BuoyantObject Public Member Functions inherited from gazebo::BuoyantObject | |
| void | ApplyBuoyancyForce () |
| Applies buoyancy force on link. More... | |
| BuoyantObject (physics::LinkPtr _link) | |
| Constructor. More... | |
| void | GetBuoyancyForce (const ignition::math::Pose3d &_pose, ignition::math::Vector3d &buoyancyForce, ignition::math::Vector3d &buoyancyTorque) |
| Returns the buoyancy force vector in the world frame. More... | |
| ignition::math::Vector3d | GetCoB () |
| Returns the stored center of buoyancy. More... | |
| bool | GetDebugFlag () |
| Returns the debug flag. More... | |
| double | GetFluidDensity () |
| Returns the stored fluid density. More... | |
| double | GetGravity () |
| Get stored acceleration of gravity. More... | |
| ignition::math::Vector3d | GetStoredVector (std::string _tag) |
| Get vector from the hydroWrench map. More... | |
| double | GetVolume () |
| Returns the stored link submerged volume. More... | |
| bool | IsNeutrallyBuoyant () |
| Returns true if the link was set to be neutrally buoyant. More... | |
| bool | IsSubmerged () |
| Returns true if the robot is completely submerged. More... | |
| void | SetBoundingBox (const ignition::math::Box &_bBox) |
| Sets bounding box. More... | |
| void | SetCoB (const ignition::math::Vector3d &_centerOfBuoyancy) |
| Sets the position of the center of buoyancy on the body frame. More... | |
| void | SetDebugFlag (bool _debugOn=true) |
| Set debug flag to store intermediate forces and torques. More... | |
| void | SetFluidDensity (double _fluidDensity) |
| Sets the fluid density in kg/m^3. More... | |
| void | SetGravity (double _g) |
| Set acceleration of gravity. More... | |
| void | SetNeutrallyBuoyant () |
| Sets this link as neutrally buoyant. More... | |
| void | SetStoreVector (std::string _tag) |
| Adds a field in the hydroWrench map. More... | |
| void | SetVolume (double _volume=-1) |
| Sets the link's submerged volume. More... | |
| ~BuoyantObject () | |
| Destructor. More... | |
Protected Member Functions | |
| bool | CheckParams (sdf::ElementPtr _sdf) |
| Returns true if all parameters are available from the SDF element. More... | |
| void | ComputeAcc (Eigen::Vector6d _velRel, double _time, double _alpha=0.3) |
| Filter acceleration (fix due to the update structure of Gazebo) More... | |
| ignition::math::Vector3d | FromNED (ignition::math::Vector3d _vec) |
| Convert vector to comply with the NED reference frame. More... | |
| HydrodynamicModel (sdf::ElementPtr _sdf, physics::LinkPtr _link) | |
| Protected constructor: Use the factory for object creation. More... | |
| ignition::math::Vector3d | ToNED (ignition::math::Vector3d _vec) |
| Convert vector to comply with the NED reference frame. More... | |
| Protected Member Functions inherited from gazebo::BuoyantObject | |
| void | StoreVector (std::string _tag, ignition::math::Vector3d _vec) |
| Store vector in the hydroWrench map if the field has been created. More... | |
Protected Attributes | |
| Eigen::Vector6d | filteredAcc |
| Filtered linear & angular acceleration vector in link frame. This is used to prevent the model to become unstable given that Gazebo only calls the update function at the beginning or at the end of a iteration of the physics engine. More... | |
| double | lastTime |
| Last timestamp (in seconds) at which ApplyHydrodynamicForces was called. More... | |
| Eigen::Vector6d | lastVelRel |
| Last body-fixed relative velocity (nu_R in Fossen's equations) More... | |
| std::vector< std::string > | params |
| List of parameters needed from the SDF element. More... | |
| double | Re |
| Reynolds number (not used by all models) More... | |
| double | temperature |
| Temperature (not used by all models) More... | |
| Protected Attributes inherited from gazebo::BuoyantObject | |
| ignition::math::Box | boundingBox |
| TEMP for calculation of the buoyancy force close to the surface. More... | |
| ignition::math::Vector3d | centerOfBuoyancy |
| Center of buoyancy in the body frame. More... | |
| bool | debugFlag |
| Debug flag, storing all intermediate forces and torques. More... | |
| double | fluidDensity |
| Fluid density. More... | |
| double | g |
| Acceleration of gravity. More... | |
| std::map< std::string, ignition::math::Vector3d > | hydroWrench |
| Storage for hydrodynamic and hydrostatic forces and torques for debugging purposes. More... | |
| bool | isSubmerged |
| Is submerged flag. More... | |
| bool | isSurfaceVessel |
| Flag set to true if the information about the metacentric width and height is available. More... | |
| bool | isSurfaceVesselFloating |
| Flag set to true if the vessel has reached its submerged height. More... | |
| physics::LinkPtr | link |
| Pointer to the correspondent robot link. More... | |
| double | metacentricLength |
| Metacentric length of the robot, used only for surface vessels and floating objects. More... | |
| double | metacentricWidth |
| bool | neutrallyBuoyant |
| If true, the restoring force will be equal to the gravitational. More... | |
| double | offsetVolume |
| Offset for the volume. More... | |
| double | scalingVolume |
| Scaling factor for the volume. More... | |
| double | submergedHeight |
| Height of the robot that is submerged (only for surface vessels) More... | |
| double | volume |
| Volume of fluid displaced by the submerged object. More... | |
| double | waterLevelPlaneArea |
| If the cross section area around water level of the surface vessel is not given, it will be computed from the object's bounding box. More... | |
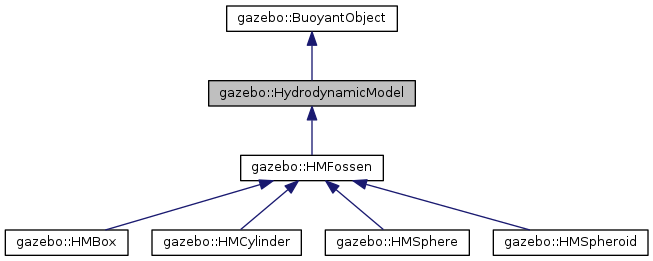
Detailed Description
Definition at line 42 of file HydrodynamicModel.hh.
Constructor & Destructor Documentation
|
protected |
Protected constructor: Use the factory for object creation.
Definition at line 22 of file HydrodynamicModel.cc.
Member Function Documentation
|
pure virtual |
Computation of the hydrodynamic forces.
Implemented in gazebo::HMFossen.
|
protected |
Returns true if all parameters are available from the SDF element.
Definition at line 143 of file HydrodynamicModel.cc.
|
protected |
Filter acceleration (fix due to the update structure of Gazebo)
Definition at line 102 of file HydrodynamicModel.cc.
|
protected |
Convert vector to comply with the NED reference frame.
Definition at line 137 of file HydrodynamicModel.cc.
|
pure virtual |
Return paramater in vector form for the given tag.
Implemented in gazebo::HMFossen.
|
pure virtual |
Return paramater in vector form for the given tag.
Implemented in gazebo::HMFossen.
|
pure virtual |
Returns type of model.
Implemented in gazebo::HMBox, gazebo::HMSpheroid, gazebo::HMCylinder, gazebo::HMSphere, and gazebo::HMFossen.
|
pure virtual |
Prints parameters.
Implemented in gazebo::HMBox, gazebo::HMSpheroid, gazebo::HMCylinder, gazebo::HMSphere, and gazebo::HMFossen.
|
pure virtual |
Set a scalar parameters.
Implemented in gazebo::HMFossen.
|
protected |
Convert vector to comply with the NED reference frame.
Definition at line 128 of file HydrodynamicModel.cc.
Member Data Documentation
|
protected |
Filtered linear & angular acceleration vector in link frame. This is used to prevent the model to become unstable given that Gazebo only calls the update function at the beginning or at the end of a iteration of the physics engine.
Definition at line 87 of file HydrodynamicModel.hh.
|
protected |
Last timestamp (in seconds) at which ApplyHydrodynamicForces was called.
Definition at line 91 of file HydrodynamicModel.hh.
|
protected |
Last body-fixed relative velocity (nu_R in Fossen's equations)
Definition at line 94 of file HydrodynamicModel.hh.
|
protected |
List of parameters needed from the SDF element.
Definition at line 97 of file HydrodynamicModel.hh.
|
protected |
Reynolds number (not used by all models)
Definition at line 100 of file HydrodynamicModel.hh.
|
protected |
Temperature (not used by all models)
Definition at line 103 of file HydrodynamicModel.hh.
The documentation for this class was generated from the following files: