#include <multi_robot_router_threaded_srr.h>
|
| bool | planPaths (const std::vector< uint32_t > &_priorityList, const std::vector< float > &_speedList, const std::vector< uint32_t > &_startSegments, const std::vector< uint32_t > &_goalSegments, const uint32_t _firstSchedule, std::vector< std::vector< RouteVertex >> &_routeCandidates, uint32_t &_robot) |
| |
| void | resetAttempt (const std::vector< Segment > &_graph) |
| |
| multi_robot_router::MultiRobotRouterThreadedSrr::MultiRobotRouterThreadedSrr |
( |
const uint32_t |
_nr_robots, |
|
|
const std::vector< uint32_t > & |
_robotDiameter, |
|
|
const uint32_t |
_threads |
|
) |
| |
constructor
- Parameters
-
| _nr_robots | the number of robots to plan |
| _robotDiameter | a vector with size _nr_robots which contains every robots diameter |
Definition at line 37 of file multi_robot_router_threaded_srr.cpp.
| multi_robot_router::MultiRobotRouterThreadedSrr::MultiRobotRouterThreadedSrr |
( |
const uint32_t |
_nr_robots, |
|
|
const uint32_t |
_threads |
|
) |
| |
| const uint32_t multi_robot_router::MultiRobotRouterThreadedSrr::getPriorityScheduleAttempts |
( |
| ) |
const |
|
virtual |
| bool multi_robot_router::MultiRobotRouterThreadedSrr::getRoutingTable |
( |
const std::vector< Segment > & |
_graph, |
|
|
const std::vector< uint32_t > & |
_startSegments, |
|
|
const std::vector< uint32_t > & |
_goalSegments, |
|
|
std::vector< std::vector< Checkpoint >> & |
_routingTable, |
|
|
const float & |
_timeLimit |
|
) |
| |
|
virtual |
computes the routing table according to the given start and goal _goalSegments
- Parameters
-
| _graph | the base graph used to plan a path |
| _startSegments | for each robot the id of the start segment |
| _goalSegments | for each robot the id of the goal segment |
| _routingTable | the reference to the found routing table |
| _timeLimit | the (approximate) maximum time the planner is allowed to use |
- Returns
- if a routing table is found
Reimplemented from multi_robot_router::MultiRobotRouter.
Definition at line 119 of file multi_robot_router_threaded_srr.cpp.
| const uint32_t multi_robot_router::MultiRobotRouterThreadedSrr::getSpeedScheduleAttempts |
( |
| ) |
const |
|
virtual |
| bool multi_robot_router::MultiRobotRouterThreadedSrr::planPaths |
( |
const std::vector< uint32_t > & |
_priorityList, |
|
|
const std::vector< float > & |
_speedList, |
|
|
const std::vector< uint32_t > & |
_startSegments, |
|
|
const std::vector< uint32_t > & |
_goalSegments, |
|
|
const uint32_t |
_firstSchedule, |
|
|
std::vector< std::vector< RouteVertex >> & |
_routeCandidates, |
|
|
uint32_t & |
_robot |
|
) |
| |
|
private |
| void multi_robot_router::MultiRobotRouterThreadedSrr::resetAttempt |
( |
const std::vector< Segment > & |
_graph | ) |
|
|
private |
| void multi_robot_router::MultiRobotRouterThreadedSrr::setPriorityRescheduling |
( |
const bool |
_status | ) |
|
|
virtual |
| void multi_robot_router::MultiRobotRouterThreadedSrr::setRobotDiameter |
( |
const std::vector< uint32_t > & |
_diameter | ) |
|
|
virtual |
| void multi_robot_router::MultiRobotRouterThreadedSrr::setRobotNr |
( |
const uint32_t |
_nr_robots | ) |
|
|
virtual |
| void multi_robot_router::MultiRobotRouterThreadedSrr::setSpeedRescheduling |
( |
const bool |
_status | ) |
|
|
virtual |
| void multi_robot_router::MultiRobotRouterThreadedSrr::setThreads |
( |
const uint32_t |
_threads | ) |
|
|
virtual |
| uint32_t multi_robot_router::MultiRobotRouterThreadedSrr::maxIterationsSingleRobot_ |
|
private |
| uint32_t multi_robot_router::MultiRobotRouterThreadedSrr::min_diameter_ |
|
private |
| uint32_t multi_robot_router::MultiRobotRouterThreadedSrr::nr_robots_ |
|
private |
| PriorityScheduler multi_robot_router::MultiRobotRouterThreadedSrr::priority_scheduler_ |
|
private |
| uint32_t multi_robot_router::MultiRobotRouterThreadedSrr::priorityScheduleAttempts_ |
|
private |
| std::vector<std::vector<uint32_t> > multi_robot_router::MultiRobotRouterThreadedSrr::robotCollisions_ |
|
private |
| std::vector<uint32_t> multi_robot_router::MultiRobotRouterThreadedSrr::robotDiameter_ |
|
private |
| RouteCoordinator* multi_robot_router::MultiRobotRouterThreadedSrr::route_coordinator_ |
|
private |
| SpeedScheduler multi_robot_router::MultiRobotRouterThreadedSrr::speed_scheduler_ |
|
private |
| uint32_t multi_robot_router::MultiRobotRouterThreadedSrr::speedScheduleAttempts_ |
|
private |
| uint32_t multi_robot_router::MultiRobotRouterThreadedSrr::threads_ = 10 |
|
private |
| bool multi_robot_router::MultiRobotRouterThreadedSrr::usePriorityRescheduler_ = true |
|
private |
| bool multi_robot_router::MultiRobotRouterThreadedSrr::useSpeedRescheduler_ = true |
|
private |
The documentation for this class was generated from the following files:
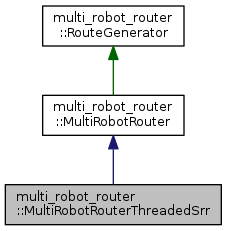
 Public Member Functions inherited from multi_robot_router::MultiRobotRouter
Public Member Functions inherited from multi_robot_router::MultiRobotRouter