#include <world_scoped_maps.h>
|
| template<typename T > |
| void | circle (T &map, const Point2D &p, int radius, const cv::Scalar &color, int thickness=1, int lineType=CV_AA) const |
| |
| template<typename T > |
| cv::Scalar_< T > | get (cv::Mat_< T > &map, const Point2D &p) const |
| |
| int | height () const |
| |
| std::string | infoHeader () const |
| |
| void | init (int width_pixel, int height_pixel, double min_y, double max_y, double min_x, double max_x, double rotation=0) |
| |
| template<typename T > |
| void | init (const T &metadata) |
| |
| bool | initialized () |
| |
| template<typename T > |
| void | line (T &map, const Point2D &p0, const Point2D &p1, const cv::Scalar &color, int thickness=1, int lineType=CV_AA) const |
| |
| Point2D | m2w (const Point2D &src) const |
| |
| Point2D | m2w (double x, double y) const |
| |
| Point2D & | m2w (const Point2D &src, Point2D &des) const |
| |
| double | max_x () const |
| |
| double | max_y () const |
| |
| double | min_x () const |
| |
| double | min_y () const |
| |
| const cv::Matx33d & | Mm2w () const |
| |
| const cv::Matx33d & | Mw2m () const |
| |
| WorldScopedMaps & | operator= (const WorldScopedMaps &)=default |
| |
| WorldScopedMaps & | operator= (WorldScopedMaps &&)=default |
| |
| double | scale_w2m (double v) const |
| |
| double | scale_x () const |
| |
| double | scale_y () const |
| |
| Point2D | w2m (const Point2D &src) const |
| |
| Point2D | w2m (double x, double y) const |
| |
| Point2D & | w2m (const Point2D &src, Point2D &des) const |
| |
| int | width () const |
| |
| | WorldScopedMaps () |
| |
| | WorldScopedMaps (const WorldScopedMaps &)=default |
| |
| | WorldScopedMaps (WorldScopedMaps &&)=default |
| |
| virtual | ~WorldScopedMaps ()=default |
| |
|
| void | init () |
| | initializes the transformation matrices More...
|
| |
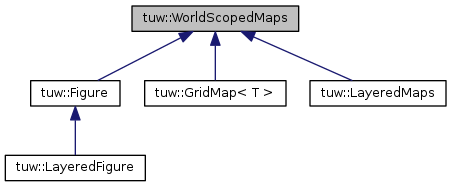
class to visualize information using OpenCV matrices
Definition at line 17 of file world_scoped_maps.h.
| WorldScopedMaps::WorldScopedMaps |
( |
| ) |
|
| virtual tuw::WorldScopedMaps::~WorldScopedMaps |
( |
| ) |
|
|
virtualdefault |
template<typename T >
| void tuw::WorldScopedMaps::circle |
( |
T & |
map, |
|
|
const Point2D & |
p, |
|
|
int |
radius, |
|
|
const cv::Scalar & |
color, |
|
|
int |
thickness = 1, |
|
|
int |
lineType = CV_AA |
|
) |
| const |
|
inline |
draws a circle given in the visualization space (meter, ....) into a pixel map
- Parameters
-
| map | opencv matrix |
| p | location |
| radius | radius |
| color | color –> |
- See also
- opencv
- Parameters
-
| thickness | line thickness –> |
- See also
- opencv
- Parameters
-
- See also
- opencv
Definition at line 108 of file world_scoped_maps.h.
template<typename T >
| cv::Scalar_<T> tuw::WorldScopedMaps::get |
( |
cv::Mat_< T > & |
map, |
|
|
const Point2D & |
p |
|
) |
| const |
|
inline |
return a copy of the value located at p in the visual space (meter, ....)
- Parameters
-
| map | opencv matrix |
| p | location |
Definition at line 118 of file world_scoped_maps.h.
| int WorldScopedMaps::height |
( |
| ) |
const |
| std::string WorldScopedMaps::infoHeader |
( |
| ) |
const |
returns information about the maps metadata
- Parameters
-
| format | using printf format |
- Returns
- string
Definition at line 109 of file world_scoped_maps.cpp.
| void WorldScopedMaps::init |
( |
| ) |
|
|
private |
| void WorldScopedMaps::init |
( |
int |
width_pixel, |
|
|
int |
height_pixel, |
|
|
double |
min_y, |
|
|
double |
max_y, |
|
|
double |
min_x, |
|
|
double |
max_x, |
|
|
double |
rotation = 0 |
|
) |
| |
used to initialize the figure
- Parameters
-
| width_pixel | pixel size of the canvas |
| height_pixel | pixel size of the canvas |
| min_y | minimal y of the visualized space |
| max_y | maximal y of the visualized space |
| min_x | minimal x of the visualized space |
| max_x | maximal x of the visualized space |
| rotation | rotation of the visualized spaces |
Definition at line 44 of file world_scoped_maps.cpp.
template<typename T >
| void tuw::WorldScopedMaps::init |
( |
const T & |
metadata | ) |
|
|
inline |
used to initialize the figure based on a ROS nav_msgs/MapMetaData
- Parameters
-
Definition at line 54 of file world_scoped_maps.h.
| bool WorldScopedMaps::initialized |
( |
| ) |
|
template<typename T >
| void tuw::WorldScopedMaps::line |
( |
T & |
map, |
|
|
const Point2D & |
p0, |
|
|
const Point2D & |
p1, |
|
|
const cv::Scalar & |
color, |
|
|
int |
thickness = 1, |
|
|
int |
lineType = CV_AA |
|
) |
| const |
|
inline |
draws a line given in the visualization space (meter, ....) into a pixel map
- Parameters
-
| map | opencv matrix |
| p0 | start point |
| p1 | end point |
| color | color –> |
- See also
- opencv
- Parameters
-
| thickness | line thickness –> |
- See also
- opencv
- Parameters
-
- See also
- opencv
Definition at line 95 of file world_scoped_maps.h.
transforms a point from the image space to visualization space (map -> world)
- Parameters
-
| src | point in image space (map [pixel]) |
- Returns
- point in visualization space (world)
Definition at line 71 of file world_scoped_maps.cpp.
| Point2D WorldScopedMaps::m2w |
( |
double |
x, |
|
|
double |
y |
|
) |
| const |
transforms a point from the image space to visualization space (map -> world)
- Parameters
-
| x | x coordinate in image space eg. [pixel] |
| y | y coordinate in image space eg. [pixel] |
- Returns
- point in visualization space (world) eg. [m]
Definition at line 74 of file world_scoped_maps.cpp.
transforms a point from the image space to visualization space (map -> world)
- Parameters
-
| src | point in image space (map [pixel]) |
| des | point in visualization space (world) |
- Returns
- reference to des
Definition at line 77 of file world_scoped_maps.cpp.
| double WorldScopedMaps::max_x |
( |
| ) |
const |
| double WorldScopedMaps::max_y |
( |
| ) |
const |
| double WorldScopedMaps::min_x |
( |
| ) |
const |
| double WorldScopedMaps::min_y |
( |
| ) |
const |
| const cv::Matx33d & WorldScopedMaps::Mm2w |
( |
| ) |
const |
- Returns
- transformation matrix from the image space to visualization space (map -> world)
Definition at line 58 of file world_scoped_maps.cpp.
| const cv::Matx33d & WorldScopedMaps::Mw2m |
( |
| ) |
const |
- Returns
- transformation matrix from the visualization space to image space (world -> map)
Definition at line 55 of file world_scoped_maps.cpp.
| double WorldScopedMaps::scale_w2m |
( |
double |
v | ) |
const |
| double WorldScopedMaps::scale_x |
( |
| ) |
const |
| double WorldScopedMaps::scale_y |
( |
| ) |
const |
transforms a point from the visualization space to image space (world -> map)
- Parameters
-
| src | point in visualization space (world) |
- Returns
- point in image space (map [pixel])
Definition at line 61 of file world_scoped_maps.cpp.
| Point2D WorldScopedMaps::w2m |
( |
double |
x, |
|
|
double |
y |
|
) |
| const |
transforms a point from the visualization space to image space (world -> map)
- Parameters
-
| x | x coordinate in visualization space (world) eg. [m] |
| y | y coordinate in visualization space (world) eg. [m] |
- Returns
- point in image space eg. [pixel]
Definition at line 64 of file world_scoped_maps.cpp.
transforms a point from the visualization space to image space (world -> map)
- Parameters
-
| src | point in visualization space (world) |
| des | point in image space (map [pixel]) |
- Returns
- reference to des
Definition at line 67 of file world_scoped_maps.cpp.
| int WorldScopedMaps::width |
( |
| ) |
const |
| double tuw::WorldScopedMaps::dx_ |
|
private |
| double tuw::WorldScopedMaps::dy_ |
|
private |
| int tuw::WorldScopedMaps::height_pixel_ |
|
private |
| double tuw::WorldScopedMaps::max_x_ |
|
private |
| double tuw::WorldScopedMaps::max_y_ |
|
private |
| double tuw::WorldScopedMaps::min_x_ |
|
private |
| double tuw::WorldScopedMaps::min_y_ |
|
private |
| cv::Matx33d tuw::WorldScopedMaps::Mm2w_ |
|
private |
| cv::Matx33d tuw::WorldScopedMaps::Mw2m_ |
|
private |
| double tuw::WorldScopedMaps::mx_ |
|
private |
| double tuw::WorldScopedMaps::my_ |
|
private |
| double tuw::WorldScopedMaps::ox_ |
|
private |
| double tuw::WorldScopedMaps::oy_ |
|
private |
| double tuw::WorldScopedMaps::rotation_ |
|
private |
| double tuw::WorldScopedMaps::sx_ |
|
private |
| double tuw::WorldScopedMaps::sy_ |
|
private |
| int tuw::WorldScopedMaps::width_pixel_ |
|
private |
The documentation for this class was generated from the following files: