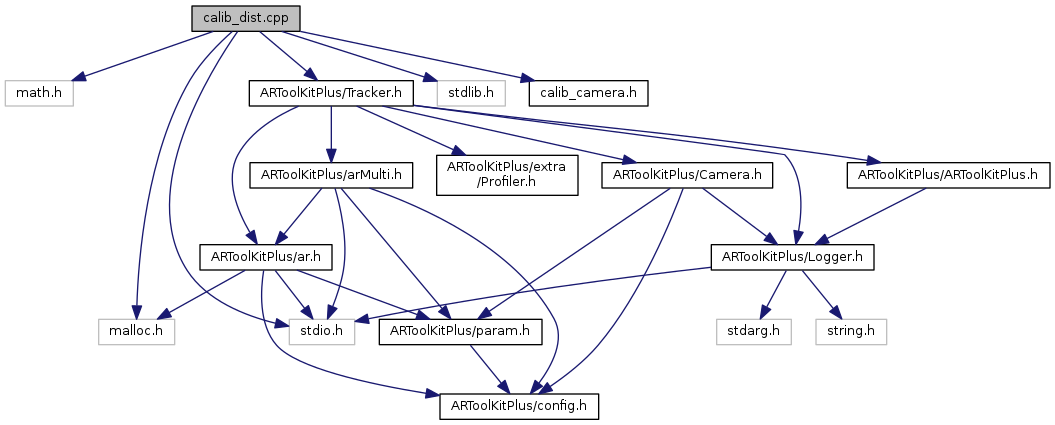
#include <math.h>#include <stdio.h>#include <stdlib.h>#include <malloc.h>#include <ARToolKitPlus/Tracker.h>#include "calib_camera.h"
Include dependency graph for calib_dist.cpp:
Go to the source code of this file.
Functions | |
| void | calc_distortion (CALIB_PATT_T *patt, int xsize, int ysize, ARFloat dist_factor[4]) |
| static ARFloat | calc_distortion2 (CALIB_PATT_T *patt, ARFloat dist_factor[4]) |
| static ARFloat | check_error (ARFloat *x, ARFloat *y, int num, ARFloat dist_factor[4]) |
| static ARFloat | get_fitting_error (CALIB_PATT_T *patt, ARFloat dist_factor[4]) |
| static ARFloat | get_size_factor (ARFloat dist_factor[4], int xsize, int ysize) |
Function Documentation
| void calc_distortion | ( | CALIB_PATT_T * | patt, |
| int | xsize, | ||
| int | ysize, | ||
| ARFloat | dist_factor[4] | ||
| ) |
Definition at line 17 of file calib_dist.cpp.
|
static |
Definition at line 123 of file calib_dist.cpp.
Definition at line 225 of file calib_dist.cpp.
|
static |
Definition at line 158 of file calib_dist.cpp.
Definition at line 66 of file calib_dist.cpp.