Defines some classes related to a robot state. There are classes RobotState and World. More...
#include "maps/grid_map.h"
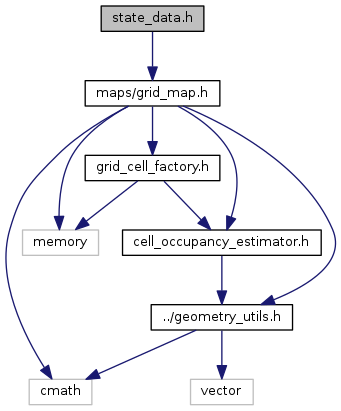
Include dependency graph for state_data.h:
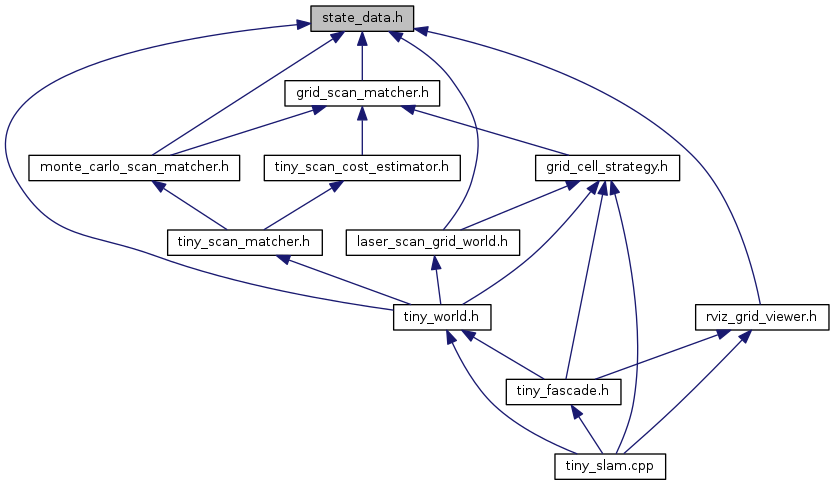
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | RobotState |
| Defines a robot position in cartesian coordinates and an angle of rotation. More... | |
| class | World< ObservationType, MapType > |
Detailed Description
Defines some classes related to a robot state. There are classes RobotState and World.
Definition in file state_data.h.