Base class for Transform implementations. More...
#include <transform.h>
Public Member Functions | |
| virtual tf::Quaternion | GetOrientation () const |
| Get the orientation of this transform. More... | |
| virtual boost::shared_ptr< TransformImpl > | Inverse () const =0 |
| virtual void | Transform (const tf::Vector3 &v_in, tf::Vector3 &v_out) const =0 |
| Apply this transform to a 3D vector. More... | |
| TransformImpl () | |
| virtual | ~TransformImpl () |
Public Attributes | |
| ros::Time | stamp_ |
| Time stamp for this transform. More... | |
Detailed Description
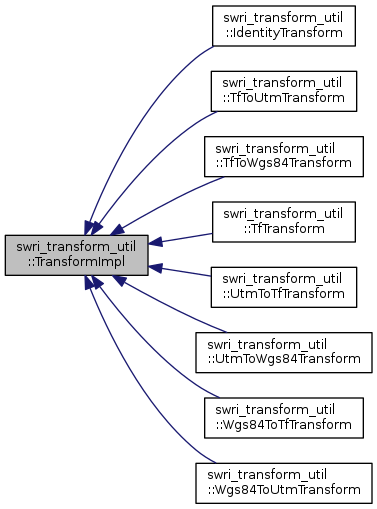
Base class for Transform implementations.
swri_transform_util::Transform uses a "pointer to implementation" design pattern. Extend this class to create new implementations of Transform. TransformImpl and its descendants should not be used bare, only as part of a swri_transform_util::Transform.
Definition at line 49 of file transform.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 52 of file transform.h.
|
inlinevirtual |
Definition at line 53 of file transform.h.
Member Function Documentation
|
inlinevirtual |
Get the orientation of this transform.
Get the orientation of this transform by getting the vector between the origin point and a point offset 1 on the x axis.
- Returns
- The orientation component of the transform
Reimplemented in swri_transform_util::TfTransform, swri_transform_util::Wgs84ToTfTransform, swri_transform_util::TfToUtmTransform, swri_transform_util::TfToWgs84Transform, and swri_transform_util::UtmToTfTransform.
Definition at line 71 of file transform.h.
|
pure virtual |
Implemented in swri_transform_util::TfTransform, swri_transform_util::IdentityTransform, swri_transform_util::Wgs84ToUtmTransform, swri_transform_util::Wgs84ToTfTransform, swri_transform_util::UtmToWgs84Transform, swri_transform_util::TfToUtmTransform, swri_transform_util::TfToWgs84Transform, and swri_transform_util::UtmToTfTransform.
|
pure virtual |
Apply this transform to a 3D vector.
- Parameters
-
[in] v_in Input vector [out] v_out Transformed vector
Implemented in swri_transform_util::TfTransform, swri_transform_util::IdentityTransform, swri_transform_util::Wgs84ToUtmTransform, swri_transform_util::Wgs84ToTfTransform, swri_transform_util::UtmToWgs84Transform, swri_transform_util::TfToUtmTransform, swri_transform_util::TfToWgs84Transform, and swri_transform_util::UtmToTfTransform.
Member Data Documentation
| ros::Time swri_transform_util::TransformImpl::stamp_ |
Time stamp for this transform.
Definition at line 93 of file transform.h.
The documentation for this class was generated from the following file: