TODO. More...
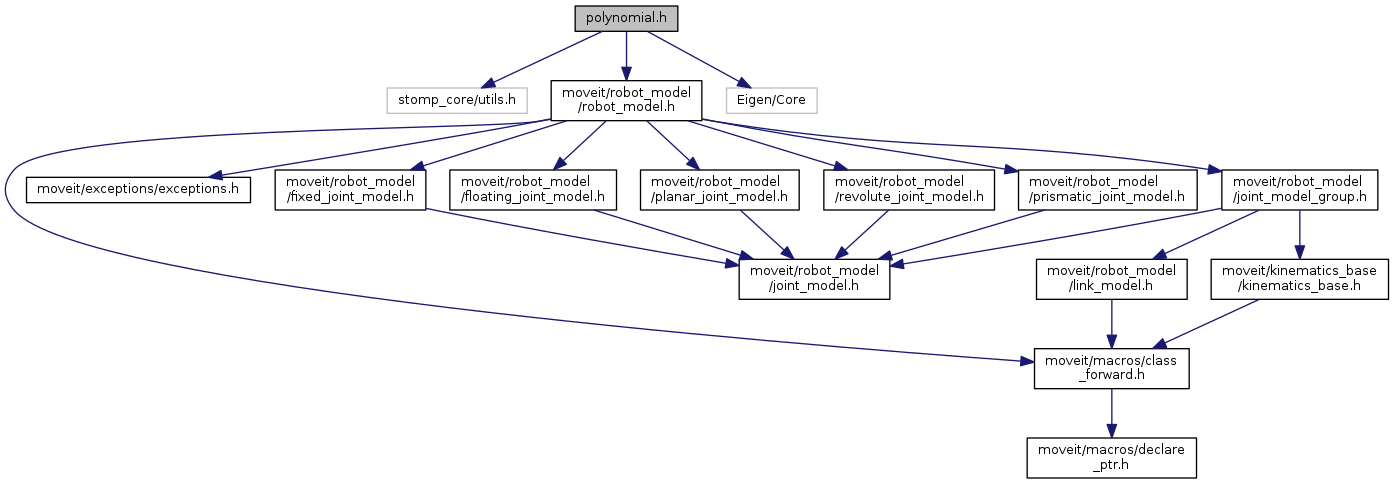
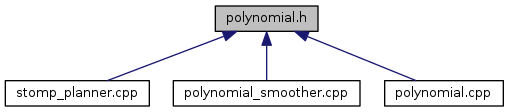
Go to the source code of this file.
Classes | |
| struct | stomp_moveit::utils::polynomial::PolyFitRequest |
| The Polynomial Fit request data. More... | |
| struct | stomp_moveit::utils::polynomial::PolyFitResults |
| The Polynomial Fit results data. More... | |
Namespaces | |
| stomp_moveit | |
Functions | |
| bool | stomp_moveit::utils::polynomial::applyPolynomialSmoothing (moveit::core::RobotModelConstPtr robot_model, const std::string &group_name, Eigen::MatrixXd ¶meters, int poly_order=5, double joint_limit_margin=1e-5) |
| Applies a polynomial smoothing method to a trajectory. It checks for joint limits and makes corrections when these are exceeded as a result of the smoothing process. More... | |
| void | stomp_moveit::utils::polynomial::fillVandermondeMatrix (const Eigen::ArrayXd &domain_vals, const int &order, Eigen::MatrixXd &v) |
| Generates a Vandermonde matrix from the domain values as described here https://en.wikipedia.org/wiki/Vandermonde_matrix. It uses the poly_order parameter in order to set the size of the matrix. More... | |
| void | stomp_moveit::utils::polynomial::generateMinimumDomainValues (const std::vector< const moveit::core::JointModel * > joint_models, const Eigen::MatrixXd ¶meters, Eigen::VectorXd &domain_values) |
| Get the polynomial smoother domain values. More... | |
| PolyFitResults | stomp_moveit::utils::polynomial::polyFit (const PolyFitRequest &request) |
| Fit a polynomial with fixed indices. More... | |
Detailed Description
TODO.
- Date
- Jan 6, 2017
- Version
- TODO
- Bug:
- No known bugs
- Copyright
- Copyright (c) 2017, Southwest Research Institute
- License
- Software License Agreement (Apache License)
- Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0
- Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Definition in file polynomial.h.
Function Documentation
| bool stomp_moveit::utils::polynomial::applyPolynomialSmoothing | ( | moveit::core::RobotModelConstPtr | robot_model, |
| const std::string & | group_name, | ||
| Eigen::MatrixXd & | parameters, | ||
| int | poly_order = 5, |
||
| double | joint_limit_margin = 1e-5 |
||
| ) |
Applies a polynomial smoothing method to a trajectory. It checks for joint limits and makes corrections when these are exceeded as a result of the smoothing process.
- Parameters
-
robot_model group_name parameters poly_order joint_limit_margin
- Returns
Definition at line 187 of file polynomial.cpp.
| void stomp_moveit::utils::polynomial::fillVandermondeMatrix | ( | const Eigen::ArrayXd & | domain_vals, |
| const int & | order, | ||
| Eigen::MatrixXd & | v | ||
| ) |
Generates a Vandermonde matrix from the domain values as described here https://en.wikipedia.org/wiki/Vandermonde_matrix. It uses the poly_order parameter in order to set the size of the matrix.
- Parameters
-
domain_vals The domain values order The order of the polynomial v The output matrix
Definition at line 149 of file polynomial.cpp.
| void stomp_moveit::utils::polynomial::generateMinimumDomainValues | ( | const std::vector< const moveit::core::JointModel * > | joint_models, |
| const Eigen::MatrixXd & | parameters, | ||
| Eigen::VectorXd & | domain_values | ||
| ) |
Get the polynomial smoother domain values.
The domain values is time. The time is calculated finding the joint that takes the longest given the total distance traveled and its max velocity. This is the dominating joint therefore its time is used as the domain values for the smoothing operation.
- Parameters
-
joint_models List of active joint models parameters The parameters generated in the previous iteration [num_dimensions x num_timesteps] domain_values The time domain values for the trajectory [num_timesteps]
Definition at line 156 of file polynomial.cpp.
| PolyFitResults stomp_moveit::utils::polynomial::polyFit | ( | const PolyFitRequest & | request | ) |
Fit a polynomial with fixed indices.
- Parameters
-
request The polynimal fit request data
- Returns
- The polynomial results
Definition at line 49 of file polynomial.cpp.