Demonstrates how to optimize a trajectory using STOMP. More...
#include <iostream>#include <Eigen/Dense>#include "stomp_core/stomp.h"#include "simple_optimization_task.h"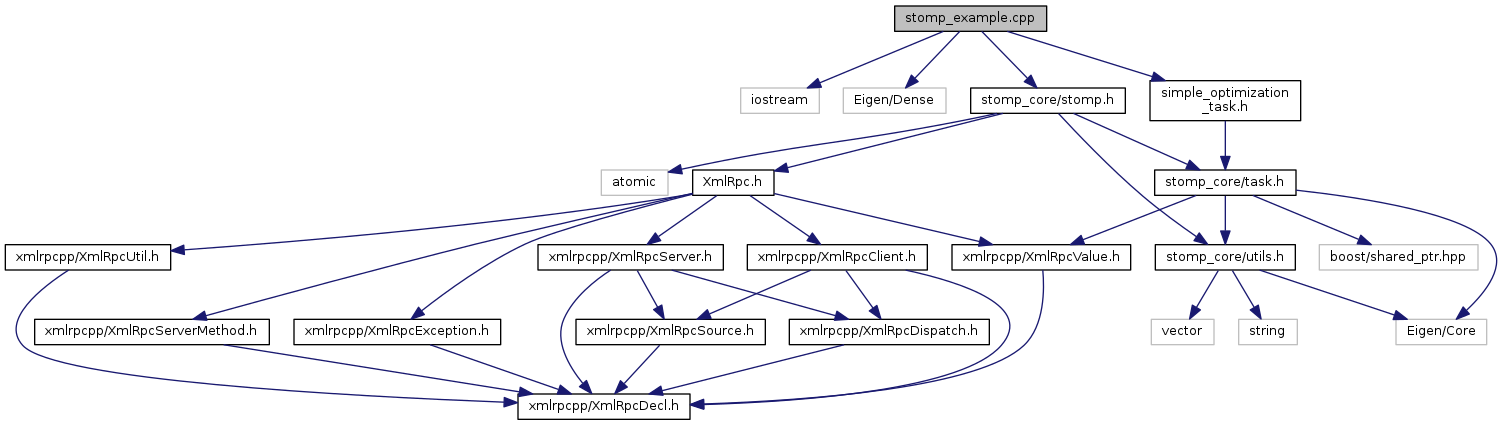
Go to the source code of this file.
Typedefs | |
| using | Trajectory = Eigen::MatrixXd |
Functions | |
| bool | compareDiff (const Trajectory &optimized, const Trajectory &desired, const std::vector< double > &thresholds) |
| Compares whether two trajectories are close to each other within a threshold. More... | |
| stomp_core::StompConfiguration | create3DOFConfiguration () |
| Creates a STOMP configuration object with default parameters. More... | |
| void | interpolate (const std::vector< double > &start, const std::vector< double > &end, std::size_t num_timesteps, Trajectory &traj) |
| Compute a linear interpolated trajectory given a start and end state. More... | |
| int | main (int argc, char **argv) |
Variables | |
| static const std::vector< double > | BIAS_THRESHOLD = {0.050,0.050,0.050} |
| static const double | DELTA_T = 0.1 |
| static const std::vector< double > | END_POS = {-1.25, 1.0, -0.26} |
| static const std::size_t | NUM_DIMENSIONS = 3 |
| static const std::size_t | NUM_TIMESTEPS = 20 |
| static const std::vector< double > | START_POS = {1.4, 1.4, 0.5} |
| static const std::vector< double > | STD_DEV = {1.0, 1.0, 1.0} |
Detailed Description
Demonstrates how to optimize a trajectory using STOMP.
- Date
- Dec 14, 2016
- Version
- TODO
- Bug:
- No known bugs
- Copyright
- Copyright (c) 2016, Southwest Research Institute
- License
- Software License Agreement (Apache License)
- Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0
- Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Definition in file stomp_example.cpp.
Typedef Documentation
| using Trajectory = Eigen::MatrixXd |
Declaring optimization variables
Definition at line 34 of file stomp_example.cpp.
Function Documentation
| bool compareDiff | ( | const Trajectory & | optimized, |
| const Trajectory & | desired, | ||
| const std::vector< double > & | thresholds | ||
| ) |
Compares whether two trajectories are close to each other within a threshold.
- Parameters
-
optimized optimized trajectory desired desired trajectory thresholds used to determine if two values are equal
- Returns
- True if the difference between the two is less than the threshold, otherwise false
Definition at line 74 of file stomp_example.cpp.
| stomp_core::StompConfiguration create3DOFConfiguration | ( | ) |
Creates a STOMP configuration object with default parameters.
- Returns
- A STOMP configuration object
[Create Config]
[Create Config]
Definition at line 47 of file stomp_example.cpp.
| void interpolate | ( | const std::vector< double > & | start, |
| const std::vector< double > & | end, | ||
| std::size_t | num_timesteps, | ||
| Trajectory & | traj | ||
| ) |
Compute a linear interpolated trajectory given a start and end state.
- Parameters
-
start start position end last position num_timesteps number of timesteps traj returned linear interpolated trajectory
Definition at line 99 of file stomp_example.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
< Creating a Task with a trajectory bias
[Create Task Object]
[Create Task Object]
[Create STOMP]
< Creating STOMP to find a trajectory close enough to the bias
[Create STOMP]
[Solve]
< Optimizing a trajectory close enough to the bias is produced
[Solve]
< Further verifying the results
Definition at line 114 of file stomp_example.cpp.
Variable Documentation
|
static |
Threshold to determine whether two trajectories are equal
Definition at line 40 of file stomp_example.cpp.
|
static |
Timestep in seconds
Definition at line 37 of file stomp_example.cpp.
|
static |
Trajectory ending posiiton
Definition at line 39 of file stomp_example.cpp.
|
static |
Number of parameters to optimize
Definition at line 35 of file stomp_example.cpp.
|
static |
Number of timesteps
Definition at line 36 of file stomp_example.cpp.
|
static |
Trajectory starting position
Definition at line 38 of file stomp_example.cpp.
|
static |
Standard deviation used for generating noisy parameters
Definition at line 41 of file stomp_example.cpp.