#include <utility>#include <memory>#include <sensor_msgs/LaserScan.h>#include <boost/shared_ptr.hpp>#include <cassert>#include <iostream>#include "../core/states/state_data.h"#include "../core/states/robot_pose.h"#include "../core/states/world.h"#include "../core/states/sensor_data.h"#include "topic_with_transform.h"
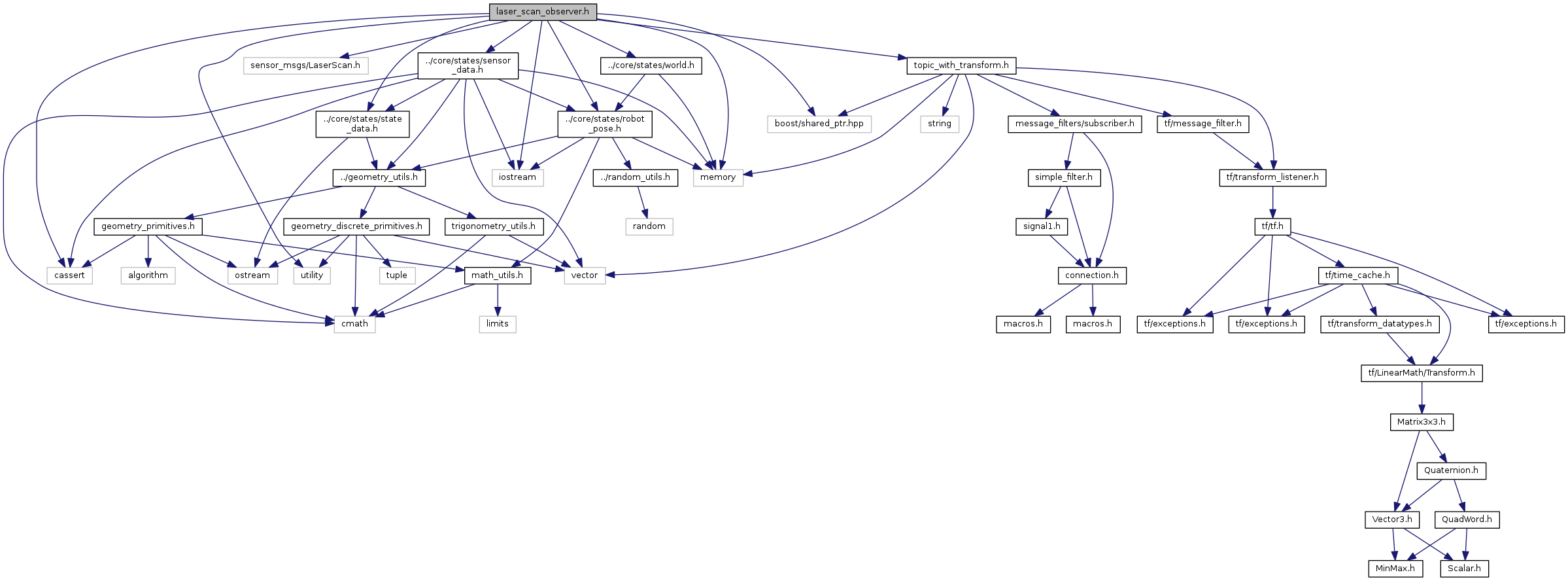
Include dependency graph for laser_scan_observer.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | LaserScanObserver |