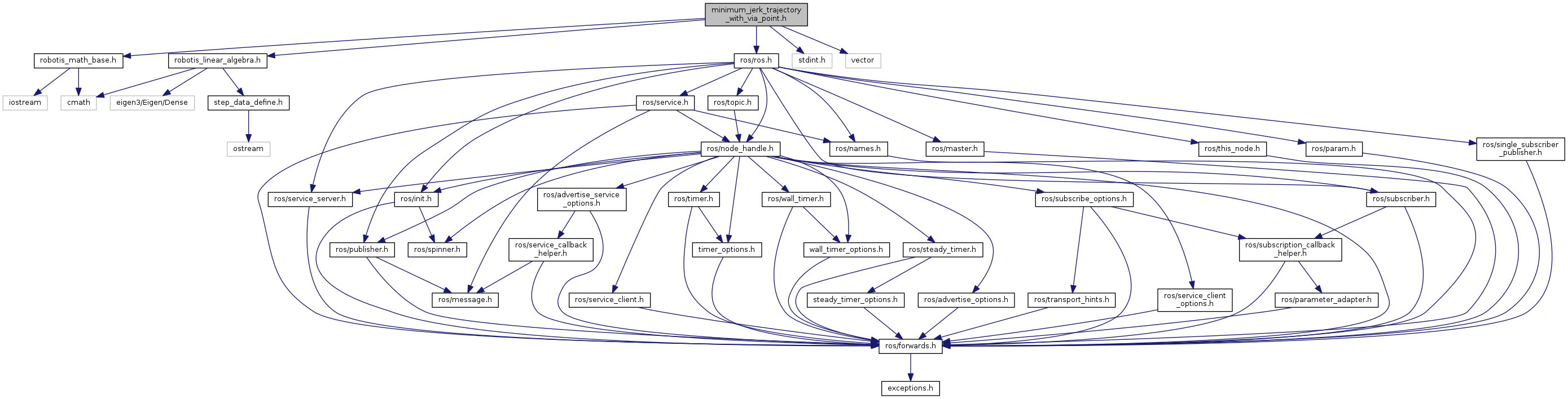
#include "robotis_linear_algebra.h"#include "robotis_math_base.h"#include <ros/ros.h>#include <stdint.h>#include <vector>
Include dependency graph for minimum_jerk_trajectory_with_via_point.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robotis_framework::MinimumJerkViaPoint |
Namespaces | |
| robotis_framework | |
Macros | |
| #define | EIGEN_NO_DEBUG |
| #define | EIGEN_NO_STATIC_ASSERT |
Macro Definition Documentation
| #define EIGEN_NO_DEBUG |
Definition at line 20 of file minimum_jerk_trajectory_with_via_point.h.
| #define EIGEN_NO_STATIC_ASSERT |
Definition at line 21 of file minimum_jerk_trajectory_with_via_point.h.