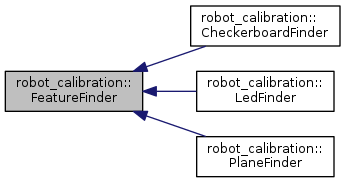
Base class for a feature finder. More...
#include <feature_finder.h>
Public Member Functions | |
| FeatureFinder () | |
| virtual bool | find (robot_calibration_msgs::CalibrationData *msg)=0 |
| Once the robot has been moved into the proper position and settled, this function will be called. It should add any new observations to the msg passed in. More... | |
| std::string | getName () |
| Get the name of this feature finder. More... | |
| virtual bool | init (const std::string &name, ros::NodeHandle &nh) |
| Initialize the feature finder. More... | |
| virtual | ~FeatureFinder () |
Private Attributes | |
| std::string | name_ |
Detailed Description
Base class for a feature finder.
Definition at line 33 of file feature_finder.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 37 of file feature_finder.h.
|
inlinevirtual |
Definition at line 38 of file feature_finder.h.
Member Function Documentation
|
pure virtual |
Once the robot has been moved into the proper position and settled, this function will be called. It should add any new observations to the msg passed in.
- Parameters
-
msg The message to which observations should be added.
- Returns
- True if feature finder succeeded in finding the features and adding them to the observation list. False otherwise.
Implemented in robot_calibration::LedFinder, robot_calibration::CheckerboardFinder, and robot_calibration::PlaneFinder.
|
inline |
Get the name of this feature finder.
Definition at line 57 of file feature_finder.h.
|
inlinevirtual |
Initialize the feature finder.
- Parameters
-
name The name of this finder. nh The nodehandle to use when loading feature finder configuration data.
- Returns
- True/False if the feature finder was able to be initialized
Reimplemented in robot_calibration::LedFinder, robot_calibration::CheckerboardFinder, and robot_calibration::PlaneFinder.
Definition at line 47 of file feature_finder.h.
Member Data Documentation
|
private |
Definition at line 74 of file feature_finder.h.
The documentation for this class was generated from the following file: