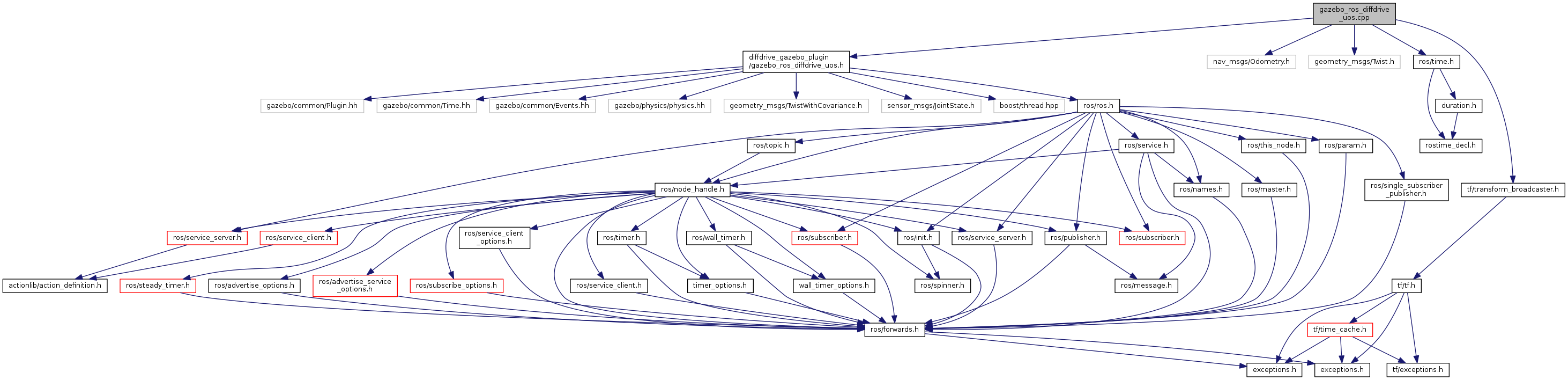
#include <diffdrive_gazebo_plugin/gazebo_ros_diffdrive_uos.h>#include <nav_msgs/Odometry.h>#include <geometry_msgs/Twist.h>#include <ros/time.h>#include <tf/transform_broadcaster.h>
Include dependency graph for gazebo_ros_diffdrive_uos.cpp:
Go to the source code of this file.
Functions | |
| GZ_REGISTER_MODEL_PLUGIN (GazeboRosDiffdrive) | |
Function Documentation
| GZ_REGISTER_MODEL_PLUGIN | ( | GazeboRosDiffdrive | ) |