#include <ros/ros.h>#include <hardware_interface/joint_command_interface.h>#include <roboteq/roboteq.h>#include <roboteq/serial_controller.h>#include <std_msgs/String.h>
Include dependency graph for roboteq_diff_drive.h:

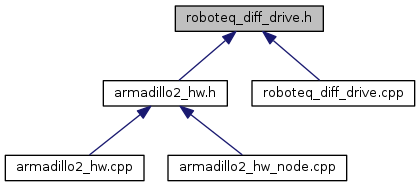
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | RoboteqDiffDrive |
Macros | |
| #define | LEFT_WHEEL_JOINT_PARAM "~left_wheel_joint" |
| #define | RIGHT_WHEEL_JOINT_PARAM "~right_wheel_joint" |
| #define | ROBOTEQ_BAUD_PARAM "~roboteq_baud" |
| #define | ROBOTEQ_PORT_PARAM "~roboteq_port" |
Typedefs | |
| typedef boost::chrono::steady_clock | time_source |
Macro Definition Documentation
| #define LEFT_WHEEL_JOINT_PARAM "~left_wheel_joint" |
Definition at line 17 of file roboteq_diff_drive.h.
| #define RIGHT_WHEEL_JOINT_PARAM "~right_wheel_joint" |
Definition at line 16 of file roboteq_diff_drive.h.
| #define ROBOTEQ_BAUD_PARAM "~roboteq_baud" |
Definition at line 15 of file roboteq_diff_drive.h.
| #define ROBOTEQ_PORT_PARAM "~roboteq_port" |
Definition at line 14 of file roboteq_diff_drive.h.
Typedef Documentation
| typedef boost::chrono::steady_clock time_source |
Definition at line 19 of file roboteq_diff_drive.h.