#include <ros/ros.h>#include <serial/serial.h>#include <mutex>#include <condition_variable>#include <thread>
Include dependency graph for serial_controller.h:

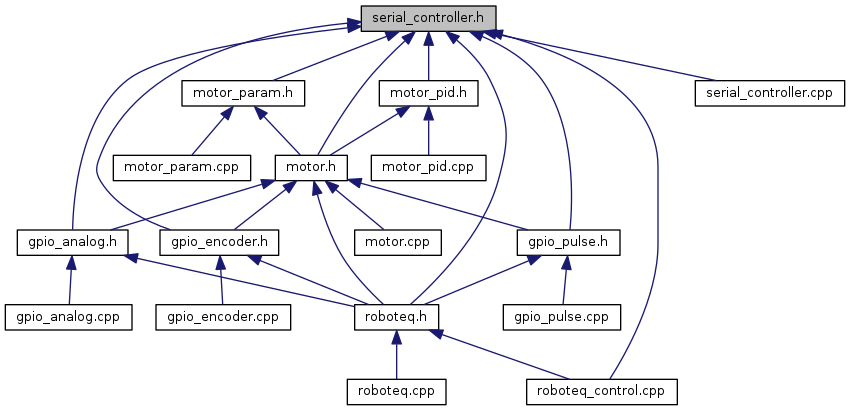
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | roboteq::serial_controller |
Namespaces | |
| roboteq | |
Typedefs | |
| typedef function< void(string data) > | roboteq::callback_data_t |
| Read complete callback - Array of callback. More... | |