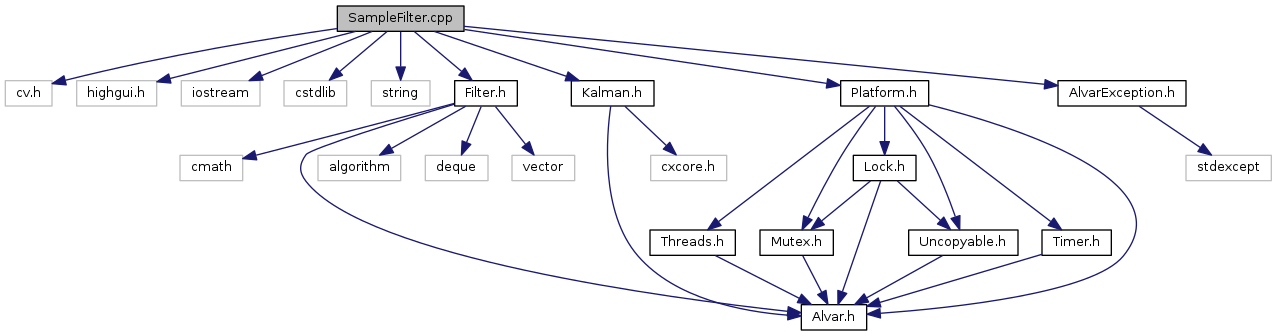
#include "cv.h"#include "highgui.h"#include <iostream>#include <cstdlib>#include <string>#include "Filter.h"#include "Kalman.h"#include "Platform.h"#include "AlvarException.h"
Include dependency graph for SampleFilter.cpp:
Go to the source code of this file.
Classes | |
| class | KalmanOwn |
| class | KalmanSensorOwn |
Functions | |
| void | filter_array_average (double x, double y, double *fx, double *fy) |
| void | filter_average (double x, double y, double *fx, double *fy) |
| void | filter_des (double x, double y, double *fx, double *fy) |
| void | filter_ekf (double x, double y, double *fx, double *fy) |
| void | filter_kalman (double x, double y, double *fx, double *fy) |
| void | filter_median (double x, double y, double *fx, double *fy) |
| void | filter_none (double x, double y, double *fx, double *fy) |
| void | filter_running_average (double x, double y, double *fx, double *fy) |
| void | filters (double x, double y, double *fx, double *fy) |
| void | get_measurement (double *x, double *y) |
| int | main (int argc, char *argv[]) |
Variables | |
| char | filter_names [nof_filters][64] |
| const int | nof_filters = 8 |
| const int | res =320 |
Function Documentation
| void filter_array_average | ( | double | x, |
| double | y, | ||
| double * | fx, | ||
| double * | fy | ||
| ) |
- Examples:
- SampleFilter.cpp.
Definition at line 78 of file SampleFilter.cpp.
| void filter_average | ( | double | x, |
| double | y, | ||
| double * | fx, | ||
| double * | fy | ||
| ) |
- Examples:
- SampleFilter.cpp.
Definition at line 19 of file SampleFilter.cpp.
| void filter_des | ( | double | x, |
| double | y, | ||
| double * | fx, | ||
| double * | fy | ||
| ) |
- Examples:
- SampleFilter.cpp.
Definition at line 40 of file SampleFilter.cpp.
| void filter_ekf | ( | double | x, |
| double | y, | ||
| double * | fx, | ||
| double * | fy | ||
| ) |
- Examples:
- SampleFilter.cpp.
Definition at line 119 of file SampleFilter.cpp.
| void filter_kalman | ( | double | x, |
| double | y, | ||
| double * | fx, | ||
| double * | fy | ||
| ) |
- Examples:
- SampleFilter.cpp.
Definition at line 47 of file SampleFilter.cpp.
| void filter_median | ( | double | x, |
| double | y, | ||
| double * | fx, | ||
| double * | fy | ||
| ) |
- Examples:
- SampleFilter.cpp.
Definition at line 26 of file SampleFilter.cpp.
| void filter_none | ( | double | x, |
| double | y, | ||
| double * | fx, | ||
| double * | fy | ||
| ) |
- Examples:
- SampleFilter.cpp.
Definition at line 15 of file SampleFilter.cpp.
| void filter_running_average | ( | double | x, |
| double | y, | ||
| double * | fx, | ||
| double * | fy | ||
| ) |
- Examples:
- SampleFilter.cpp.
Definition at line 33 of file SampleFilter.cpp.
| void filters | ( | double | x, |
| double | y, | ||
| double * | fx, | ||
| double * | fy | ||
| ) |
- Examples:
- SampleFilter.cpp.
| void get_measurement | ( | double * | x, |
| double * | y | ||
| ) |
- Examples:
- SampleFilter.cpp.
Definition at line 166 of file SampleFilter.cpp.
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
- Examples:
- SampleFilter.cpp.
Definition at line 187 of file SampleFilter.cpp.
Variable Documentation
| char filter_names[nof_filters][64] |
Initial value:
={
"No filter - Press any key to change",
"Average",
"Median",
"Running Average",
"Double Exponential Smoothing",
"Kalman",
"Extended Kalman",
"Array (average)"
}
- Examples:
- SampleFilter.cpp.
Definition at line 154 of file SampleFilter.cpp.
| const int nof_filters = 8 |
- Examples:
- SampleFilter.cpp.
Definition at line 143 of file SampleFilter.cpp.
| const int res =320 |
- Examples:
- SampleFilter.cpp.
Definition at line 13 of file SampleFilter.cpp.