#include <joint.h>
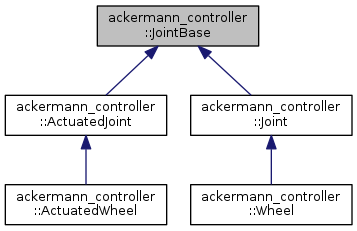
Inheritance diagram for ackermann_controller::JointBase:
Public Member Functions | |
| JointBase (const std::string &name, const std::string &base_link_name, boost::shared_ptr< urdf::ModelInterface > model) | |
Public Attributes | |
| hardware_interface::JointStateHandle | handle_ |
| boost::shared_ptr< const urdf::Joint > | joint_ |
| double | lateral_deviation_ |
| std::string | name_ |
Detailed Description
Constructor & Destructor Documentation
|
inline |
Member Data Documentation
| hardware_interface::JointStateHandle ackermann_controller::JointBase::handle_ |
| boost::shared_ptr<const urdf::Joint> ackermann_controller::JointBase::joint_ |
The documentation for this struct was generated from the following file: