Hardware interface for a robot. More...
#include <rrbot_hw_interface.h>
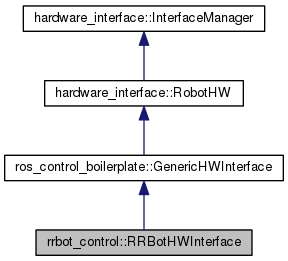
Inheritance diagram for rrbot_control::RRBotHWInterface:
Public Member Functions | |
| virtual void | enforceLimits (ros::Duration &period) |
| virtual void | read (ros::Duration &elapsed_time) |
| Read the state from the robot hardware. | |
| RRBotHWInterface (ros::NodeHandle &nh, urdf::Model *urdf_model=NULL) | |
| Constructor. | |
| virtual void | write (ros::Duration &elapsed_time) |
| Write the command to the robot hardware. | |
Detailed Description
Hardware interface for a robot.
Definition at line 49 of file rrbot_hw_interface.h.
Constructor & Destructor Documentation
| rrbot_control::RRBotHWInterface::RRBotHWInterface | ( | ros::NodeHandle & | nh, |
| urdf::Model * | urdf_model = NULL |
||
| ) |
Constructor.
- Parameters:
-
nh - Node handle for topics.
Definition at line 45 of file rrbot_hw_interface.cpp.
Member Function Documentation
| void rrbot_control::RRBotHWInterface::enforceLimits | ( | ros::Duration & | period | ) | [virtual] |
Enforce limits for all values before writing
Implements ros_control_boilerplate::GenericHWInterface.
Definition at line 89 of file rrbot_hw_interface.cpp.
| void rrbot_control::RRBotHWInterface::read | ( | ros::Duration & | elapsed_time | ) | [virtual] |
Read the state from the robot hardware.
Implements ros_control_boilerplate::GenericHWInterface.
Definition at line 51 of file rrbot_hw_interface.cpp.
| void rrbot_control::RRBotHWInterface::write | ( | ros::Duration & | elapsed_time | ) | [virtual] |
Write the command to the robot hardware.
Implements ros_control_boilerplate::GenericHWInterface.
Definition at line 64 of file rrbot_hw_interface.cpp.
The documentation for this class was generated from the following files: