Include dependency graph for trajectory.h:

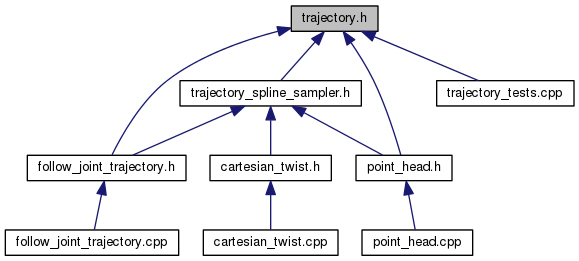
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | robot_controllers::Trajectory |
| struct | robot_controllers::TrajectoryPoint |
| Basis for a Trajectory Point. More... | |
| class | robot_controllers::TrajectorySampler |
| Base class for samplers of trajectories. More... | |
Namespaces | |
| namespace | robot_controllers |
Functions | |
| void | robot_controllers::rosPrintTrajectory (Trajectory &t) |
| Print trajectory to ROS INFO. | |
| bool | robot_controllers::spliceTrajectories (const Trajectory &t1, const Trajectory &t2, const double time, Trajectory *t) |
| Splice two trajectories. | |
| bool | robot_controllers::trajectoryFromMsg (const trajectory_msgs::JointTrajectory &message, const std::vector< std::string > joints, Trajectory *trajectory) |
| Convert message into Trajectory. | |
| bool | robot_controllers::unwindTrajectoryPoint (std::vector< bool > continuous, TrajectoryPoint &p) |
| bool | robot_controllers::windupTrajectory (std::vector< bool > continuous, Trajectory &trajectory) |
| Windup the trajectory so that continuous joints do not wrap. | |