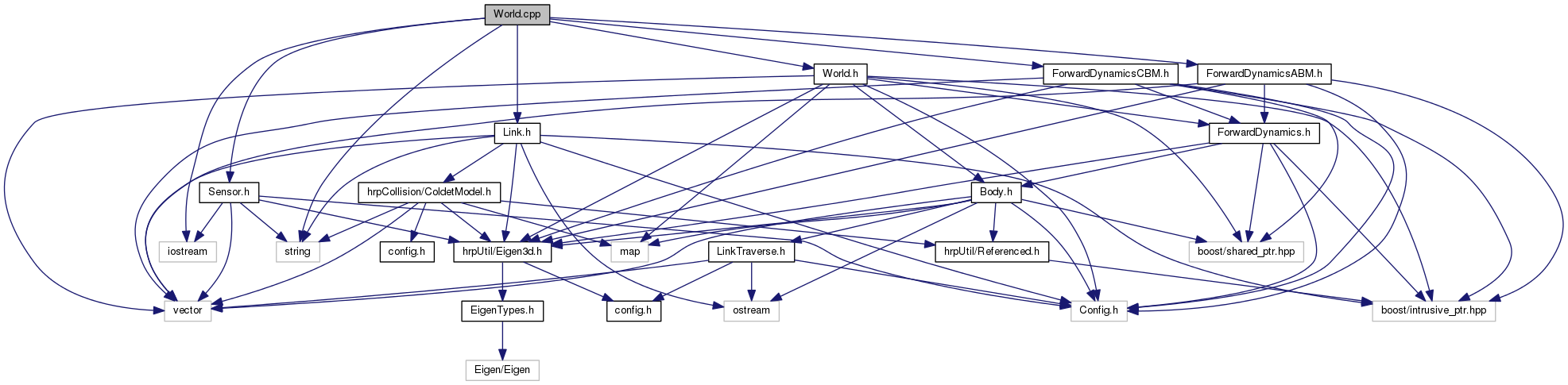
#include <iostream>#include "World.h"#include "Link.h"#include "Sensor.h"#include "ForwardDynamicsABM.h"#include "ForwardDynamicsCBM.h"#include <string>
Include dependency graph for hrplib/hrpModel/World.cpp:
Go to the source code of this file.
Variables | |
| static const bool | debugMode = false |
| static const double | DEFAULT_GRAVITY_ACCELERATION = 9.80665 |
Detailed Description
Definition in file hrplib/hrpModel/World.cpp.
Variable Documentation
Definition at line 27 of file hrplib/hrpModel/World.cpp.
const double DEFAULT_GRAVITY_ACCELERATION = 9.80665 [static] |
Definition at line 25 of file hrplib/hrpModel/World.cpp.