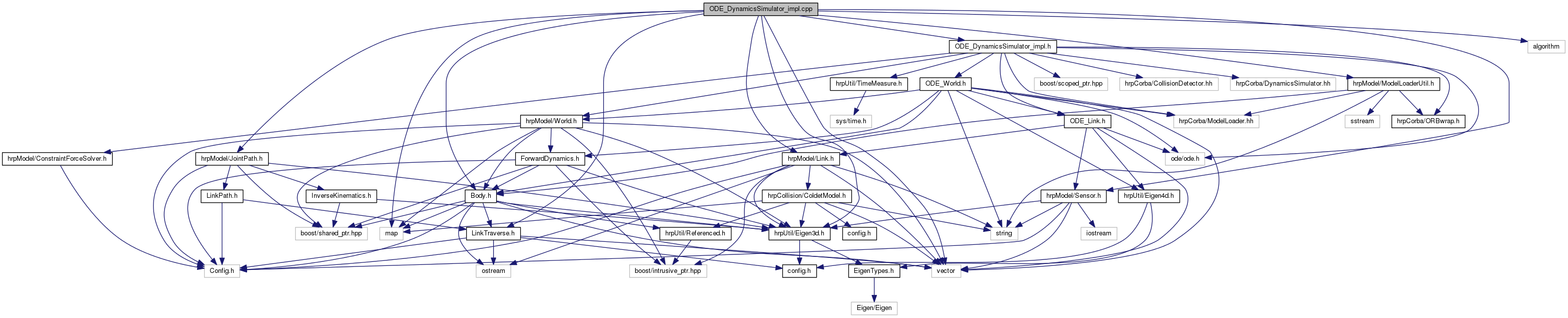
#include "ODE_DynamicsSimulator_impl.h"#include <hrpUtil/Eigen3d.h>#include <hrpModel/Body.h>#include <hrpModel/Link.h>#include <hrpModel/LinkTraverse.h>#include <hrpModel/JointPath.h>#include <hrpModel/Sensor.h>#include <hrpModel/ModelLoaderUtil.h>#include <vector>#include <map>#include <algorithm>
Include dependency graph for ODE_DynamicsSimulator_impl.cpp:
Go to the source code of this file.
Functions | |
| template<typename X , typename X_ptr > | |
| X_ptr | checkCorbaServer (std::string n, CosNaming::NamingContext_var &cxt) |
Variables | |
| static const int | debugMode = false |
| static const bool | enableTimeMeasure = false |
| static const bool | USE_INTERNAL_COLLISION_DETECTOR = false |
| static const bool | USE_ODE_COLLISION_DETECTOR = true |
Function Documentation
template<typename X , typename X_ptr >
| X_ptr checkCorbaServer | ( | std::string | n, |
| CosNaming::NamingContext_var & | cxt | ||
| ) |
Definition at line 80 of file ODE_DynamicsSimulator_impl.cpp.
Variable Documentation
Definition at line 31 of file ODE_DynamicsSimulator_impl.cpp.
const bool enableTimeMeasure = false [static] |
Definition at line 32 of file ODE_DynamicsSimulator_impl.cpp.
const bool USE_INTERNAL_COLLISION_DETECTOR = false [static] |
Definition at line 29 of file ODE_DynamicsSimulator_impl.cpp.
const bool USE_ODE_COLLISION_DETECTOR = true [static] |
Definition at line 30 of file ODE_DynamicsSimulator_impl.cpp.