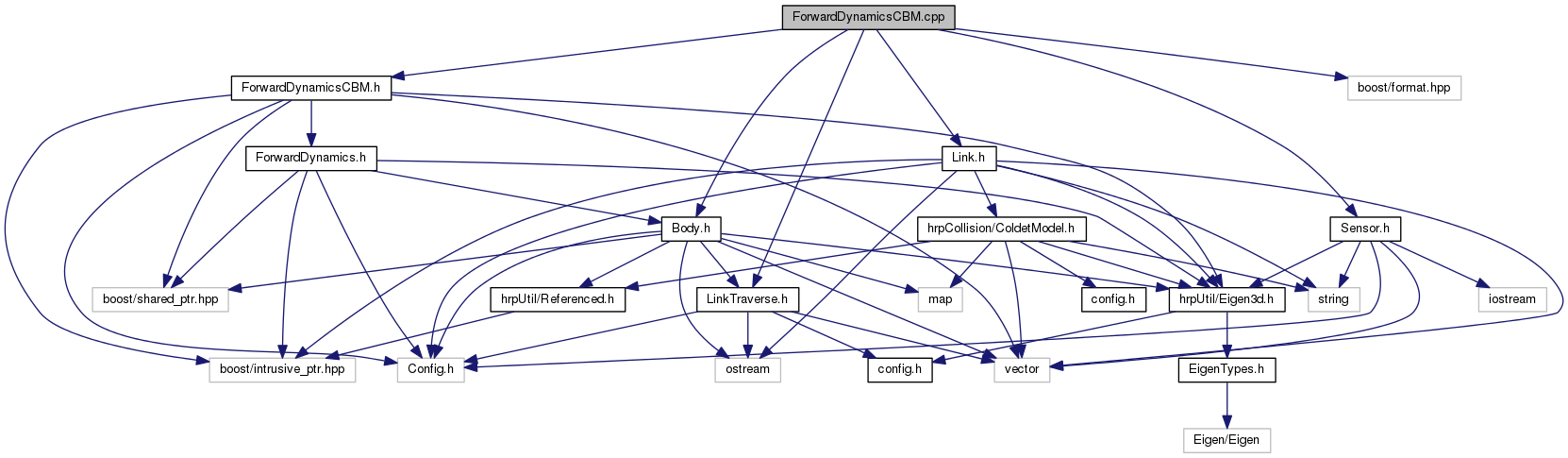
#include "Body.h"#include "Link.h"#include "LinkTraverse.h"#include "Sensor.h"#include "ForwardDynamicsCBM.h"#include <boost/format.hpp>
Include dependency graph for ForwardDynamicsCBM.cpp:
Go to the source code of this file.
Functions | |
| template<class TMatrix > | |
| static void | putMatrix (TMatrix &M, char *name) |
| template<class TVector > | |
| static void | putVector (TVector &M, char *name) |
Variables | |
| static const bool | CALC_ALL_JOINT_TORQUES = false |
| static const bool | debugMode = false |
| static const bool | ROOT_ATT_NORMALIZATION_ENABLED = false |
Detailed Description
Definition in file ForwardDynamicsCBM.cpp.
Function Documentation
Definition at line 32 of file ForwardDynamicsCBM.cpp.
Definition at line 48 of file ForwardDynamicsCBM.cpp.
Variable Documentation
const bool CALC_ALL_JOINT_TORQUES = false [static] |
Definition at line 24 of file ForwardDynamicsCBM.cpp.
Definition at line 27 of file ForwardDynamicsCBM.cpp.
const bool ROOT_ATT_NORMALIZATION_ENABLED = false [static] |
Definition at line 25 of file ForwardDynamicsCBM.cpp.