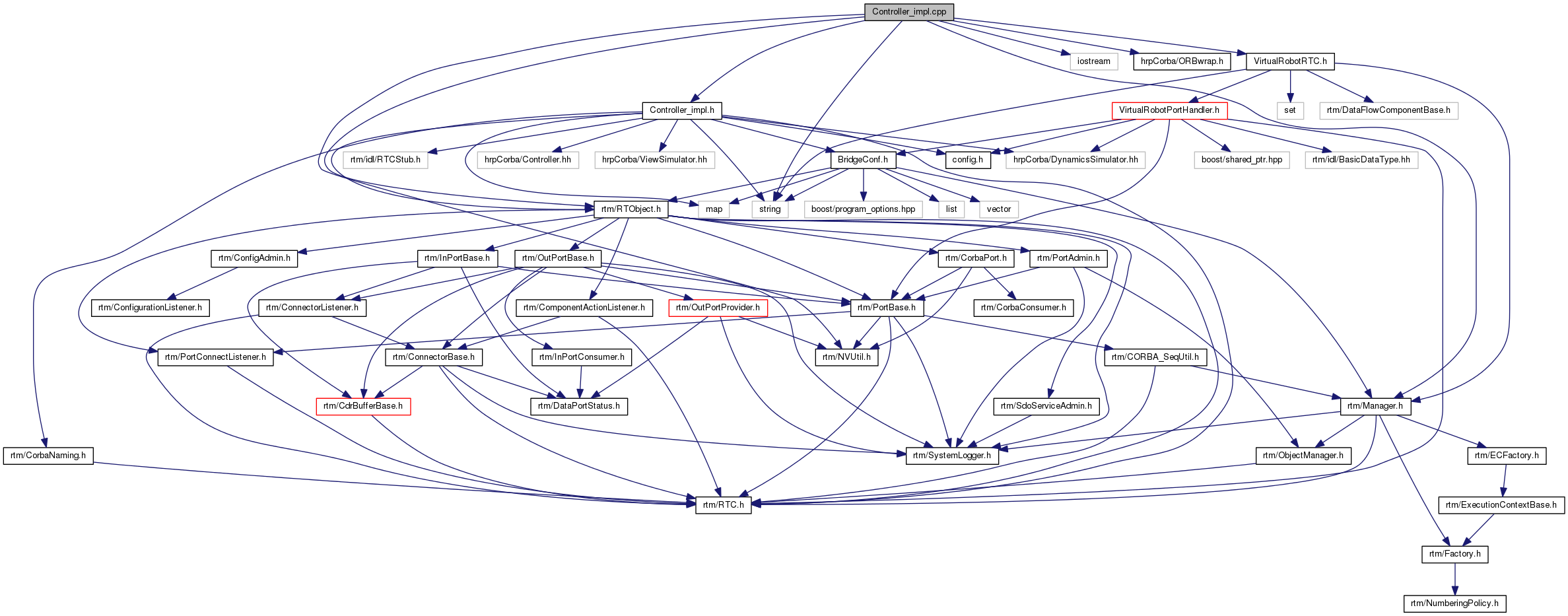
#include "Controller_impl.h"#include <string>#include <iostream>#include <rtm/Manager.h>#include <rtm/RTObject.h>#include <rtm/NVUtil.h>#include <hrpCorba/ORBwrap.h>#include "VirtualRobotRTC.h"
Include dependency graph for Controller_impl.cpp:
Go to the source code of this file.
Detailed Description
Definition in file Controller_impl.cpp.