#include <VehicleDifferential.h>
Classes | |
| class | ControllerRawForces |
| class | ControllerTwistPID |
| struct | TControllerInput |
| struct | TControllerOutput |
Public Types | |
| enum | { WHEEL_L = 0, WHEEL_R = 1 } |
Public Member Functions | |
| DynamicsDifferential (World *parent) | |
| virtual vec3 | getVelocityLocalOdoEstimate () const |
Protected Member Functions | |
| virtual void | dynamics_load_params_from_xml (const rapidxml::xml_node< char > *xml_node) |
| virtual void | invoke_motor_controllers (const TSimulContext &context, std::vector< double > &out_force_per_wheel) |
Private Attributes | |
| ControllerBasePtr | m_controller |
| The installed controller. | |
Controllers | |
| typedef ControllerBaseTempl < DynamicsDifferential > | ControllerBase |
| typedef std::shared_ptr < ControllerBase > | ControllerBasePtr |
| const ControllerBasePtr & | getController () const |
| ControllerBasePtr & | getController () |
| virtual ControllerBaseInterface * | getControllerInterface () |
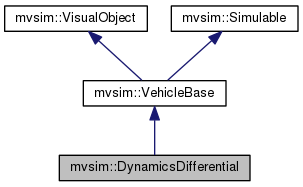
Detailed Description
Implementation of differential-driven vehicles.
- See also:
- class factory in VehicleBase::factory
Definition at line 22 of file VehicleDifferential.h.
Member Typedef Documentation
Virtual base for controllers of vehicles of type DynamicsDifferential
Definition at line 48 of file VehicleDifferential.h.
| typedef std::shared_ptr<ControllerBase> mvsim::DynamicsDifferential::ControllerBasePtr |
Definition at line 49 of file VehicleDifferential.h.
Member Enumeration Documentation
| anonymous enum |
Definition at line 26 of file VehicleDifferential.h.
Constructor & Destructor Documentation
| DynamicsDifferential::DynamicsDifferential | ( | World * | parent | ) |
Definition at line 22 of file VehicleDifferential.cpp.
Member Function Documentation
| void DynamicsDifferential::dynamics_load_params_from_xml | ( | const rapidxml::xml_node< char > * | xml_node | ) | [protected, virtual] |
The derived-class part of load_params_from_xml()
Implements mvsim::VehicleBase.
Definition at line 47 of file VehicleDifferential.cpp.
| const ControllerBasePtr& mvsim::DynamicsDifferential::getController | ( | ) | const [inline] |
Definition at line 107 of file VehicleDifferential.h.
| ControllerBasePtr& mvsim::DynamicsDifferential::getController | ( | ) | [inline] |
Definition at line 108 of file VehicleDifferential.h.
| virtual ControllerBaseInterface* mvsim::DynamicsDifferential::getControllerInterface | ( | ) | [inline, virtual] |
Implements mvsim::VehicleBase.
Definition at line 109 of file VehicleDifferential.h.
| vec3 DynamicsDifferential::getVelocityLocalOdoEstimate | ( | ) | const [virtual] |
Gets the current estimation of odometry-based velocity as reconstructed solely from wheels spinning velocities and geometry. This is the input of any realistic low-level controller onboard.
- See also:
- getVelocityLocal()
Implements mvsim::VehicleBase.
Definition at line 149 of file VehicleDifferential.cpp.
| void DynamicsDifferential::invoke_motor_controllers | ( | const TSimulContext & | context, |
| std::vector< double > & | out_force_per_wheel | ||
| ) | [protected, virtual] |
Implements mvsim::VehicleBase.
Definition at line 129 of file VehicleDifferential.cpp.
Member Data Documentation
The installed controller.
Definition at line 127 of file VehicleDifferential.h.
The documentation for this class was generated from the following files: