#include <spi_sensor_read_controller.h>
Public Member Functions | |
| std::vector< double > | get_sensor_value () |
| std::vector< int > | get_spi_channel () |
| virtual bool | init (ros_ethercat_model::RobotStateInterface *robot, ros::NodeHandle &n) |
| void | update (const ros::Time &, const ros::Duration &) |
| Issues commands to the joint. Should be called at regular intervals. | |
Protected Attributes | |
| ros::Time | last_publish_time_ |
Static Protected Attributes | |
| static const double | publish_rate_ = 100 |
Private Attributes | |
| std::vector< uint16_t > | chip_select_masks_ |
| std::vector< ros::ServiceServer > | command_srv_ |
| bool | first_run_ |
| realtime_tools::RealtimePublisher < std_msgs::Float64MultiArray > | sensor_data_publisher_ |
| std_msgs::Float64MultiArray | sensor_msg_ |
| std::vector< int > | spi_channel_ |
| std::vector< SplittedSPICommand > | standard_commands_ |
Static Private Attributes | |
| static const int | default_spi_channel_ = 1 |
| static const size_t | sensor_message_length_ = 2 |
| static const size_t | spi_mode_ = 1 |
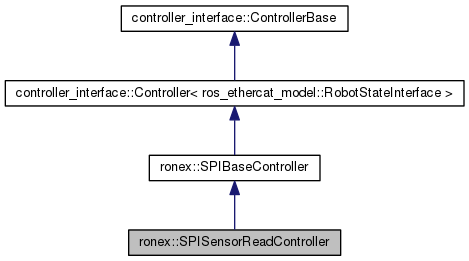
Detailed Description
Definition at line 40 of file spi_sensor_read_controller.h.
Member Function Documentation
| std::vector< double > ronex::SPISensorReadController::get_sensor_value | ( | ) |
Definition at line 176 of file spi_sensor_read_controller.cpp.
| std::vector< int > ronex::SPISensorReadController::get_spi_channel | ( | ) |
Definition at line 181 of file spi_sensor_read_controller.cpp.
| bool ronex::SPISensorReadController::init | ( | ros_ethercat_model::RobotStateInterface * | robot, |
| ros::NodeHandle & | n | ||
| ) | [virtual] |
Reimplemented from ronex::SPIBaseController.
Definition at line 41 of file spi_sensor_read_controller.cpp.
| void ronex::SPISensorReadController::update | ( | const ros::Time & | , |
| const ros::Duration & | |||
| ) | [virtual] |
Issues commands to the joint. Should be called at regular intervals.
Reimplemented from ronex::SPIBaseController.
Definition at line 84 of file spi_sensor_read_controller.cpp.
Member Data Documentation
std::vector<uint16_t> ronex::SPISensorReadController::chip_select_masks_ [private] |
Definition at line 69 of file spi_sensor_read_controller.h.
std::vector<ros::ServiceServer> ronex::SPISensorReadController::command_srv_ [private] |
Definition at line 62 of file spi_sensor_read_controller.h.
const int ronex::SPISensorReadController::default_spi_channel_ = 1 [static, private] |
Definition at line 56 of file spi_sensor_read_controller.h.
bool ronex::SPISensorReadController::first_run_ [private] |
Definition at line 70 of file spi_sensor_read_controller.h.
Definition at line 51 of file spi_sensor_read_controller.h.
const double ronex::SPISensorReadController::publish_rate_ = 100 [static, protected] |
Definition at line 52 of file spi_sensor_read_controller.h.
realtime_tools::RealtimePublisher<std_msgs::Float64MultiArray> ronex::SPISensorReadController::sensor_data_publisher_ [private] |
Definition at line 63 of file spi_sensor_read_controller.h.
const size_t ronex::SPISensorReadController::sensor_message_length_ = 2 [static, private] |
Definition at line 57 of file spi_sensor_read_controller.h.
std_msgs::Float64MultiArray ronex::SPISensorReadController::sensor_msg_ [private] |
Definition at line 61 of file spi_sensor_read_controller.h.
std::vector<int> ronex::SPISensorReadController::spi_channel_ [private] |
Definition at line 55 of file spi_sensor_read_controller.h.
const size_t ronex::SPISensorReadController::spi_mode_ = 1 [static, private] |
Definition at line 58 of file spi_sensor_read_controller.h.
std::vector<SplittedSPICommand> ronex::SPISensorReadController::standard_commands_ [private] |
Definition at line 67 of file spi_sensor_read_controller.h.
The documentation for this class was generated from the following files: