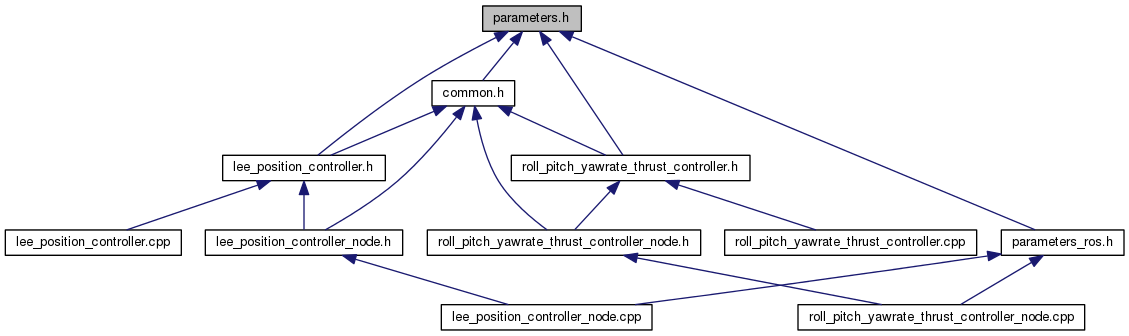
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | rotors_control::Rotor |
| struct | rotors_control::RotorConfiguration |
| class | rotors_control::VehicleParameters |
Namespaces | |
| namespace | rotors_control |
Variables | |
| static constexpr double | rotors_control::kDefaultArmLength = 0.215 |
| static constexpr double | rotors_control::kDefaultGravity = 9.81 |
| static constexpr double | rotors_control::kDefaultInertiaXx = 0.0347563 |
| static constexpr double | rotors_control::kDefaultInertiaYy = 0.0458929 |
| static constexpr double | rotors_control::kDefaultInertiaZz = 0.0977 |
| static constexpr double | rotors_control::kDefaultMass = 1.56779 |
| static constexpr double | rotors_control::kDefaultRotor0Angle = 0.52359877559 |
| static constexpr double | rotors_control::kDefaultRotor1Angle = 1.57079632679 |
| static constexpr double | rotors_control::kDefaultRotor2Angle = 2.61799387799 |
| static constexpr double | rotors_control::kDefaultRotor3Angle = -2.61799387799 |
| static constexpr double | rotors_control::kDefaultRotor4Angle = -1.57079632679 |
| static constexpr double | rotors_control::kDefaultRotor5Angle = -0.52359877559 |
| static constexpr double | rotors_control::kDefaultRotorForceConstant = 8.54858e-6 |
| static constexpr double | rotors_control::kDefaultRotorMomentConstant = 1.6e-2 |