#include <PatrolAgent.h>
Detailed Description
Definition at line 60 of file PatrolAgent.h.
Constructor & Destructor Documentation
| PatrolAgent::PatrolAgent | ( | ) | [inline] |
Definition at line 103 of file PatrolAgent.h.
Member Function Documentation
| void PatrolAgent::backup | ( | ) |
Definition at line 625 of file PatrolAgent.cpp.
| void PatrolAgent::cancelGoal | ( | ) |
Definition at line 515 of file PatrolAgent.cpp.
| bool PatrolAgent::check_interference | ( | int | ID_ROBOT | ) |
Definition at line 602 of file PatrolAgent.cpp.
| virtual int PatrolAgent::compute_next_vertex | ( | ) | [pure virtual] |
Definition at line 667 of file PatrolAgent.cpp.
| void PatrolAgent::do_send_message | ( | std_msgs::Int16MultiArray & | msg | ) |
Definition at line 781 of file PatrolAgent.cpp.
| void PatrolAgent::getRobotPose | ( | int | robotid, |
| float & | x, | ||
| float & | y, | ||
| float & | theta | ||
| ) |
Definition at line 442 of file PatrolAgent.cpp.
| void PatrolAgent::goalActiveCallback | ( | ) |
Definition at line 570 of file PatrolAgent.cpp.
| void PatrolAgent::goalDoneCallback | ( | const actionlib::SimpleClientGoalState & | state, |
| const move_base_msgs::MoveBaseResultConstPtr & | result | ||
| ) |
Definition at line 522 of file PatrolAgent.cpp.
| void PatrolAgent::goalFeedbackCallback | ( | const move_base_msgs::MoveBaseFeedbackConstPtr & | feedback | ) |
Definition at line 575 of file PatrolAgent.cpp.
| void PatrolAgent::init | ( | int | argc, |
| char ** | argv | ||
| ) | [virtual] |
D.Portugal: needed in case you "rosrun" from another folder
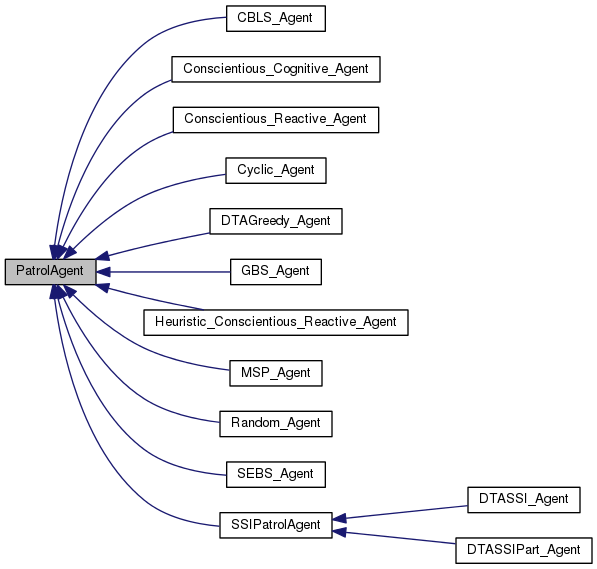
Reimplemented in SSIPatrolAgent, CBLS_Agent, DTAGreedy_Agent, DTASSIPart_Agent, SEBS_Agent, GBS_Agent, MSP_Agent, Conscientious_Cognitive_Agent, and Cyclic_Agent.
Definition at line 59 of file PatrolAgent.cpp.
| void PatrolAgent::initialize_node | ( | ) |
Definition at line 416 of file PatrolAgent.cpp.
| void PatrolAgent::odomCB | ( | const nav_msgs::Odometry::ConstPtr & | msg | ) |
Definition at line 476 of file PatrolAgent.cpp.
| void PatrolAgent::onGoalComplete | ( | ) | [virtual] |
SEND GOAL (REACHED) AND INTENTION
Reimplemented in SSIPatrolAgent, CBLS_Agent, and Conscientious_Cognitive_Agent.
Definition at line 339 of file PatrolAgent.cpp.
| void PatrolAgent::onGoalNotComplete | ( | ) |
Definition at line 363 of file PatrolAgent.cpp.
| void PatrolAgent::positionsCB | ( | const nav_msgs::Odometry::ConstPtr & | msg | ) |
Definition at line 731 of file PatrolAgent.cpp.
| void PatrolAgent::processEvents | ( | ) | [virtual] |
Reimplemented in CBLS_Agent, SEBS_Agent, and GBS_Agent.
Definition at line 398 of file PatrolAgent.cpp.
| void PatrolAgent::readParams | ( | ) |
Definition at line 240 of file PatrolAgent.cpp.
| void PatrolAgent::ready | ( | ) |
Definition at line 208 of file PatrolAgent.cpp.
| void PatrolAgent::receive_positions | ( | ) |
Definition at line 726 of file PatrolAgent.cpp.
| void PatrolAgent::receive_results | ( | ) | [virtual] |
Reimplemented in SSIPatrolAgent, CBLS_Agent, DTAGreedy_Agent, SEBS_Agent, and GBS_Agent.
Definition at line 796 of file PatrolAgent.cpp.
| void PatrolAgent::resultsCB | ( | const std_msgs::Int16MultiArray::ConstPtr & | msg | ) |
Definition at line 819 of file PatrolAgent.cpp.
| void PatrolAgent::run | ( | ) | [virtual] |
Definition at line 268 of file PatrolAgent.cpp.
| void PatrolAgent::send_goal_reached | ( | ) |
Definition at line 584 of file PatrolAgent.cpp.
| void PatrolAgent::send_interference | ( | ) |
Definition at line 800 of file PatrolAgent.cpp.
| void PatrolAgent::send_positions | ( | ) |
Definition at line 702 of file PatrolAgent.cpp.
| void PatrolAgent::send_results | ( | ) | [virtual] |
Reimplemented in SSIPatrolAgent, CBLS_Agent, DTAGreedy_Agent, SEBS_Agent, and GBS_Agent.
Definition at line 776 of file PatrolAgent.cpp.
| void PatrolAgent::sendGoal | ( | int | next_vertex | ) |
Definition at line 496 of file PatrolAgent.cpp.
| void PatrolAgent::update_idleness | ( | ) |
Definition at line 402 of file PatrolAgent.cpp.
Member Data Documentation
int PatrolAgent::aborted_count [protected] |
Definition at line 90 of file PatrolAgent.h.
MoveBaseClient* PatrolAgent::ac [protected] |
Definition at line 92 of file PatrolAgent.h.
ros::Publisher PatrolAgent::cmd_vel_pub [protected] |
Definition at line 98 of file PatrolAgent.h.
double PatrolAgent::communication_delay [protected] |
Definition at line 88 of file PatrolAgent.h.
uint PatrolAgent::current_vertex [protected] |
Definition at line 74 of file PatrolAgent.h.
uint PatrolAgent::dimension [protected] |
Definition at line 73 of file PatrolAgent.h.
bool PatrolAgent::end_simulation [protected] |
Definition at line 80 of file PatrolAgent.h.
bool PatrolAgent::goal_canceled_by_user [protected] |
Definition at line 87 of file PatrolAgent.h.
bool PatrolAgent::goal_complete [protected] |
Definition at line 78 of file PatrolAgent.h.
double PatrolAgent::goal_reached_wait [protected] |
Definition at line 88 of file PatrolAgent.h.
std::string PatrolAgent::graph_file [protected] |
Definition at line 72 of file PatrolAgent.h.
int PatrolAgent::ID_ROBOT [protected] |
Definition at line 65 of file PatrolAgent.h.
std::string PatrolAgent::initial_positions [protected] |
Definition at line 89 of file PatrolAgent.h.
bool PatrolAgent::initialize [protected] |
Definition at line 79 of file PatrolAgent.h.
double* PatrolAgent::instantaneous_idleness [protected] |
Definition at line 84 of file PatrolAgent.h.
bool PatrolAgent::interference [protected] |
Definition at line 76 of file PatrolAgent.h.
double PatrolAgent::last_communication_delay_time [protected] |
Definition at line 88 of file PatrolAgent.h.
double PatrolAgent::last_interference [protected] |
Definition at line 77 of file PatrolAgent.h.
double* PatrolAgent::last_visit [protected] |
Definition at line 85 of file PatrolAgent.h.
tf::TransformListener* PatrolAgent::listener [protected] |
Definition at line 70 of file PatrolAgent.h.
double PatrolAgent::lost_message_rate [protected] |
Definition at line 88 of file PatrolAgent.h.
std::string PatrolAgent::mapname [protected] |
Definition at line 72 of file PatrolAgent.h.
int PatrolAgent::next_vertex [protected] |
Definition at line 81 of file PatrolAgent.h.
ros::Subscriber PatrolAgent::odom_sub [protected] |
Definition at line 94 of file PatrolAgent.h.
ros::Publisher PatrolAgent::positions_pub [protected] |
Definition at line 95 of file PatrolAgent.h.
ros::Subscriber PatrolAgent::positions_sub [protected] |
Definition at line 94 of file PatrolAgent.h.
int PatrolAgent::resend_goal_count [protected] |
Definition at line 90 of file PatrolAgent.h.
bool PatrolAgent::ResendGoal [protected] |
Definition at line 75 of file PatrolAgent.h.
ros::Publisher PatrolAgent::results_pub [protected] |
Definition at line 97 of file PatrolAgent.h.
ros::Subscriber PatrolAgent::results_sub [protected] |
Definition at line 96 of file PatrolAgent.h.
int PatrolAgent::TEAMSIZE [protected] |
Definition at line 64 of file PatrolAgent.h.
vertex* PatrolAgent::vertex_web [protected] |
Definition at line 83 of file PatrolAgent.h.
std::vector<int> PatrolAgent::vresults [protected] |
Definition at line 86 of file PatrolAgent.h.
double PatrolAgent::xPos[NUM_MAX_ROBOTS] [protected] |
Definition at line 67 of file PatrolAgent.h.
double PatrolAgent::yPos[NUM_MAX_ROBOTS] [protected] |
Definition at line 68 of file PatrolAgent.h.
The documentation for this class was generated from the following files: