#include <Opcode.h>
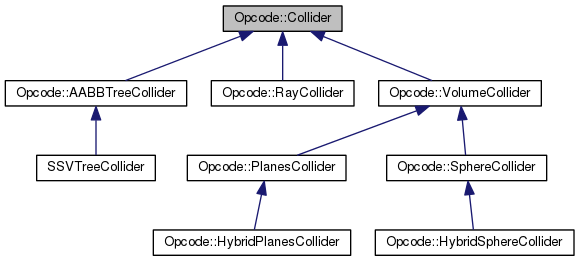
Inheritance diagram for Opcode::Collider:
Public Member Functions | |
| Collider () | |
| inline_ BOOL | ContactFound () const |
| inline_ BOOL | FirstContactEnabled () const |
| inline_ BOOL | GetContactStatus () const |
| inline_ void | SetFirstContact (bool flag) |
| inline_ void | SetPrimitiveTests (bool flag) |
| inline_ void | SetTemporalCoherence (bool flag) |
| inline_ BOOL | SkipPrimitiveTests () const |
| inline_ BOOL | TemporalCoherenceEnabled () const |
| inline_ BOOL | TemporalHit () const |
| virtual const char * | ValidateSettings ()=0 |
| virtual | ~Collider () |
Protected Member Functions | |
| virtual inline_ void | InitQuery () |
| inline_ BOOL | Setup (const BaseModel *model) |
Protected Attributes | |
| const BaseModel * | mCurrentModel |
| Current model for collision query (owner of touched faces) | |
| udword | mFlags |
| Bit flags. | |
| const MeshInterface * | mIMesh |
| User-defined mesh interface. | |
Detailed Description
Constructor & Destructor Documentation
Constructor.
Definition at line 40 of file OPC_Collider.cpp.
| Collider::~Collider | ( | ) | [virtual] |
Destructor.
Definition at line 52 of file OPC_Collider.cpp.
Member Function Documentation
| inline_ BOOL Opcode::Collider::ContactFound | ( | ) | const [inline] |
| inline_ BOOL Opcode::Collider::FirstContactEnabled | ( | ) | const [inline] |
| inline_ BOOL Opcode::Collider::GetContactStatus | ( | ) | const [inline] |
| virtual inline_ void Opcode::Collider::InitQuery | ( | ) | [inline, protected, virtual] |
| inline_ void Opcode::Collider::SetFirstContact | ( | bool | flag | ) | [inline] |
Reports all contacts (false) or first contact only (true)
- Parameters:
-
flag [in] true for first contact, false for all contacts
| inline_ void Opcode::Collider::SetPrimitiveTests | ( | bool | flag | ) | [inline] |
| inline_ void Opcode::Collider::SetTemporalCoherence | ( | bool | flag | ) | [inline] |
Enable/disable temporal coherence.
- Parameters:
-
flag [in] true to enable temporal coherence, false to discard it
| inline_ BOOL Opcode::Collider::Setup | ( | const BaseModel * | model | ) | [inline, protected] |
| inline_ BOOL Opcode::Collider::SkipPrimitiveTests | ( | ) | const [inline] |
| inline_ BOOL Opcode::Collider::TemporalCoherenceEnabled | ( | ) | const [inline] |
| inline_ BOOL Opcode::Collider::TemporalHit | ( | ) | const [inline] |
| virtual const char* Opcode::Collider::ValidateSettings | ( | ) | [pure virtual] |
Validates current settings. You should call this method after all the settings / callbacks have been defined for a collider.
- Returns:
- null if everything is ok, else a string describing the problem
Member Data Documentation
const BaseModel* Opcode::Collider::mCurrentModel [protected] |
udword Opcode::Collider::mFlags [protected] |
const MeshInterface* Opcode::Collider::mIMesh [protected] |
The documentation for this class was generated from the following files: