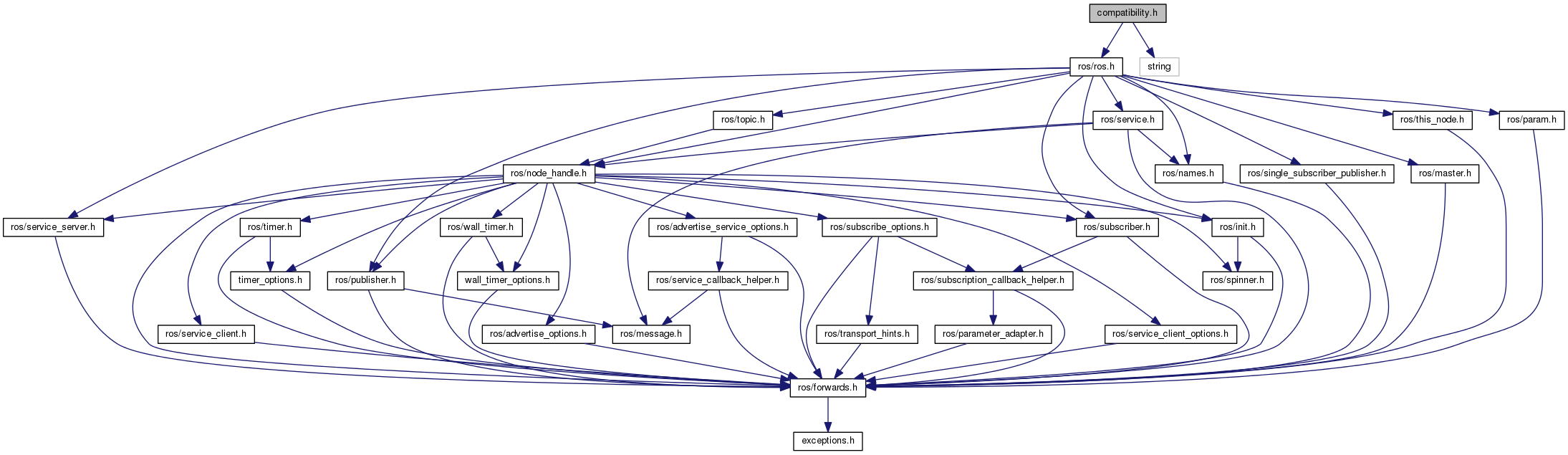
Include dependency graph for compatibility.h:
Go to the source code of this file.
Namespaces | |
| namespace | neonavigation_common |
| namespace | neonavigation_common::compat |
Defines | |
| #define | STATIC_ASSERT(EXPR) static_assert(EXPR, #EXPR) |
Functions | |
| template<class M > | |
| ros::Publisher | neonavigation_common::compat::advertise (ros::NodeHandle &nh_new, const std::string &topic_new, ros::NodeHandle &nh_old, const std::string &topic_old, uint32_t queue_size, bool latch=false) |
| template<class T , class MReq , class MRes > | |
| ros::ServiceServer | neonavigation_common::compat::advertiseService (ros::NodeHandle &nh_new, const std::string &service_new, ros::NodeHandle &nh_old, const std::string &service_old, bool(T::*srv_func)(MReq &, MRes &), T *obj) |
| void | neonavigation_common::compat::checkCompatMode () |
| template<typename T > | |
| void | neonavigation_common::compat::deprecatedParam (const ros::NodeHandle &nh, const std::string &key, T ¶m, const T &default_value) |
| int | neonavigation_common::compat::getCompat () |
| std::string | neonavigation_common::compat::getSimplifiedNamespace (ros::NodeHandle &nh) |
| neonavigation_common::compat::STATIC_ASSERT (supported_level<=current_level &¤t_level<=supported_level+1) | |
| neonavigation_common::compat::STATIC_ASSERT (supported_level<=default_level &&default_level<=current_level) | |
| template<class M > | |
| ros::Subscriber | neonavigation_common::compat::subscribe (ros::NodeHandle &nh_new, const std::string &topic_new, ros::NodeHandle &nh_old, const std::string &topic_old, uint32_t queue_size, void(*fp)(M), const ros::TransportHints &transport_hints=ros::TransportHints()) |
| template<class M , class T > | |
| ros::Subscriber | neonavigation_common::compat::subscribe (ros::NodeHandle &nh_new, const std::string &topic_new, ros::NodeHandle &nh_old, const std::string &topic_old, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const ros::TransportHints &transport_hints=ros::TransportHints()) |
| template<class M > | |
| ros::Subscriber | neonavigation_common::compat::subscribe (ros::NodeHandle &nh_new, const std::string &topic_new, ros::NodeHandle &nh_old, const std::string &topic_old, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const ros::VoidConstPtr &tracked_object=ros::VoidConstPtr(), const ros::TransportHints &transport_hints=ros::TransportHints()) |
Variables | |
| const int | neonavigation_common::compat::current_level = 1 |
| const int | neonavigation_common::compat::default_level = supported_level |
| const int | neonavigation_common::compat::supported_level = 0 |
Define Documentation
| #define STATIC_ASSERT | ( | EXPR | ) | static_assert(EXPR, #EXPR) |
Definition at line 41 of file compatibility.h.