#include <Simulable.h>
Public Member Functions | |
| virtual void | apply_force (double fx, double fy, double local_ptx=0.0, double local_pty=0.0) |
| virtual void | simul_post_timestep (const TSimulContext &context) |
| virtual void | simul_pre_timestep (const TSimulContext &context) |
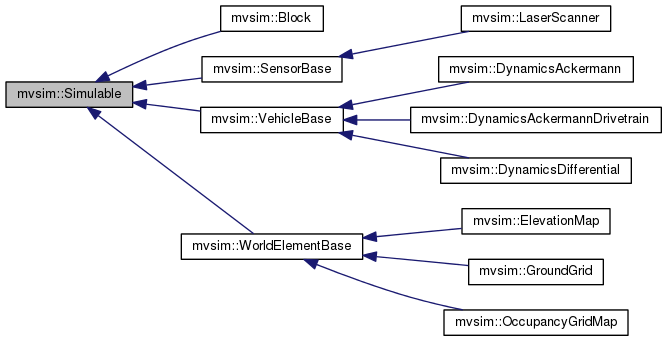
Detailed Description
Definition at line 16 of file Simulable.h.
Member Function Documentation
| virtual void mvsim::Simulable::apply_force | ( | double | fx, |
| double | fy, | ||
| double | local_ptx = 0.0, |
||
| double | local_pty = 0.0 |
||
| ) | [inline, virtual] |
Override to register external forces exerted by other WorldElements. Force is (fx,fy) in global coordinates. Application point is (local_ptx,local_pty) in the body local frame
Reimplemented in mvsim::VehicleBase, and mvsim::Block.
Definition at line 32 of file Simulable.h.
| virtual void mvsim::Simulable::simul_post_timestep | ( | const TSimulContext & | context | ) | [inline, virtual] |
Override to do any required process right after the integration of dynamic equations for each timestep
Reimplemented in mvsim::VehicleBase, mvsim::Block, mvsim::ElevationMap, and mvsim::LaserScanner.
Definition at line 26 of file Simulable.h.
| virtual void mvsim::Simulable::simul_pre_timestep | ( | const TSimulContext & | context | ) | [inline, virtual] |
Process right before the integration of dynamic equations for each timestep: set action forces from motors, update friction models, etc.
Reimplemented in mvsim::VehicleBase, mvsim::Block, mvsim::ElevationMap, mvsim::OccupancyGridMap, and mvsim::LaserScanner.
Definition at line 21 of file Simulable.h.
The documentation for this class was generated from the following file: