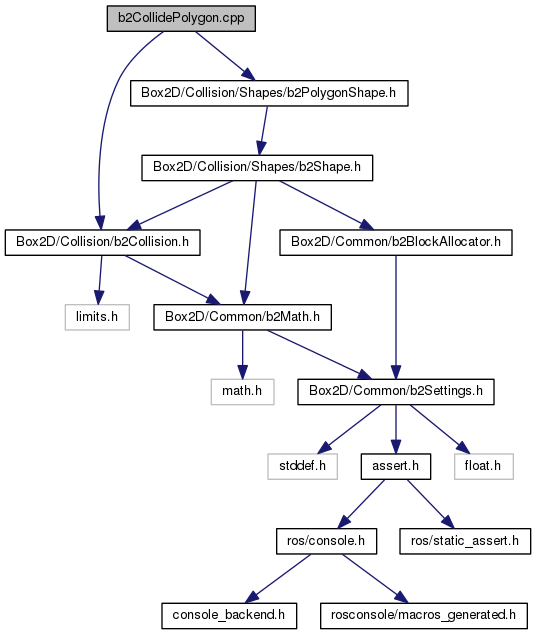
Include dependency graph for b2CollidePolygon.cpp:
Go to the source code of this file.
Functions | |
| void | b2CollidePolygons (b2Manifold *manifold, const b2PolygonShape *polyA, const b2Transform &xfA, const b2PolygonShape *polyB, const b2Transform &xfB) |
| Compute the collision manifold between two polygons. | |
| static void | b2FindIncidentEdge (b2ClipVertex c[2], const b2PolygonShape *poly1, const b2Transform &xf1, int32 edge1, const b2PolygonShape *poly2, const b2Transform &xf2) |
| static float32 | b2FindMaxSeparation (int32 *edgeIndex, const b2PolygonShape *poly1, const b2Transform &xf1, const b2PolygonShape *poly2, const b2Transform &xf2) |
Function Documentation
| void b2CollidePolygons | ( | b2Manifold * | manifold, |
| const b2PolygonShape * | polyA, | ||
| const b2Transform & | xfA, | ||
| const b2PolygonShape * | polyB, | ||
| const b2Transform & | xfB | ||
| ) |
Compute the collision manifold between two polygons.
Definition at line 116 of file b2CollidePolygon.cpp.
| static void b2FindIncidentEdge | ( | b2ClipVertex | c[2], |
| const b2PolygonShape * | poly1, | ||
| const b2Transform & | xf1, | ||
| int32 | edge1, | ||
| const b2PolygonShape * | poly2, | ||
| const b2Transform & | xf2 | ||
| ) | [static] |
Definition at line 64 of file b2CollidePolygon.cpp.
| static float32 b2FindMaxSeparation | ( | int32 * | edgeIndex, |
| const b2PolygonShape * | poly1, | ||
| const b2Transform & | xf1, | ||
| const b2PolygonShape * | poly2, | ||
| const b2Transform & | xf2 | ||
| ) | [static] |
Definition at line 23 of file b2CollidePolygon.cpp.