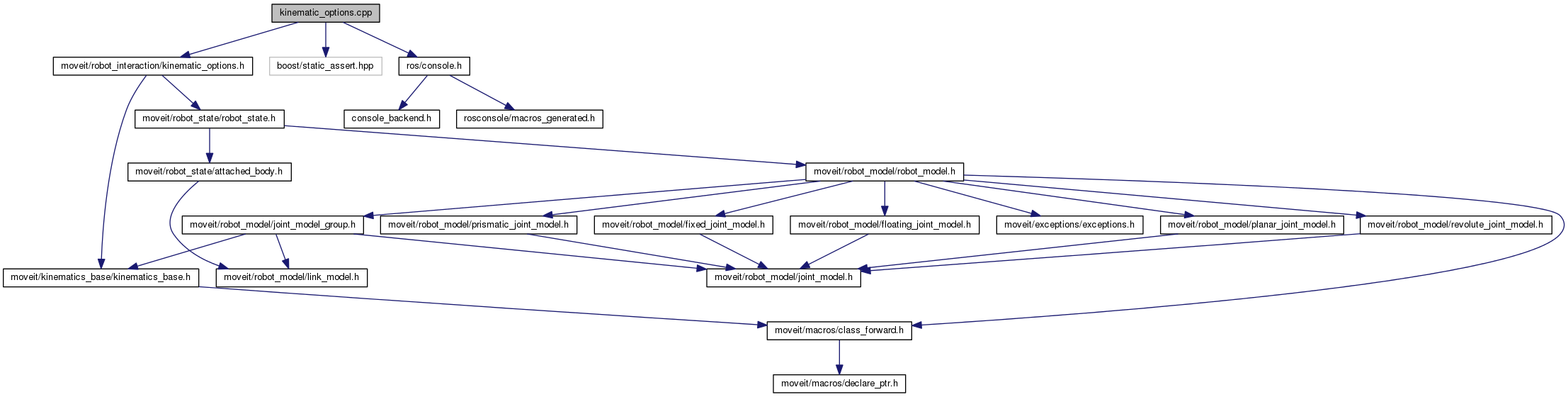
#include <moveit/robot_interaction/kinematic_options.h>#include <boost/static_assert.hpp>#include <ros/console.h>
Include dependency graph for kinematic_options.cpp:
Go to the source code of this file.
Defines | |
| #define | F(type, member, enumval) type member; |
| #define | F(type, member, enumval) type member; |
| #define | F(type, member, enumval) |
| #define | F(type, member, enumval) |
| #define | O_FIELDS(F) |
| #define | QO_FIELDS(F) |
Define Documentation
| #define F | ( | type, | |
| member, | |||
| enumval | |||
| ) | type member; |
| #define F | ( | type, | |
| member, | |||
| enumval | |||
| ) | type member; |
| #define F | ( | type, | |
| member, | |||
| enumval | |||
| ) |
Value:
if (fields & KinematicOptions::enumval) \
member = source.member;
| #define F | ( | type, | |
| member, | |||
| enumval | |||
| ) |
Value:
if (fields & KinematicOptions::enumval) \
options_.member = source.options_.member;
Value:
F(double, timeout_seconds_, TIMEOUT) \ F(unsigned int, max_attempts_, MAX_ATTEMPTS) \ F(robot_state::GroupStateValidityCallbackFn, state_validity_callback_, STATE_VALIDITY_CALLBACK)
Value:
F(bool, lock_redundant_joints, LOCK_REDUNDANT_JOINTS) \ F(bool, return_approximate_solution, RETURN_APPROXIMATE_SOLUTION) \ F(::kinematics::DiscretizationMethods::DiscretizationMethod, discretization_method, DISCRETIZATION_METHOD)