Classes |
| class | rs::context |
| | Context. More...
|
| class | rs::device |
| | Provides convenience methods relating to devices. More...
|
| class | rs::error |
| struct | rs::extrinsics |
| | Cross-stream extrinsics: encode the topology describing how the different devices are connected. More...
|
| struct | rs::float2 |
| struct | rs::float3 |
| class | rs::frame |
| | Frame. More...
|
| class | rs::frame_callback |
| struct | rs::intrinsics |
| | Video stream intrinsics. More...
|
| class | rs::log_callback |
| class | rs::motion_callback |
| struct | rs::motion_data |
| | Motion data from gyroscope and accelerometer from the microcontroller. More...
|
| struct | rs::motion_intrinsics |
| | Motion device intrinsics: scale, bias, and variances. More...
|
| class | rs::timestamp_callback |
| struct | rs::timestamp_data |
| | Timestamp data from the motion microcontroller. More...
|
Namespaces |
| namespace | rs |
Enumerations |
| enum | rs::blob_type { rs::motion_module_firmware_update
} |
| | Proprietary formats for direct communication with device firmware. More...
|
| enum | rs::camera_info {
rs::device_name,
rs::serial_number,
rs::camera_firmware_version,
rs::adapter_board_firmware_version,
rs::motion_module_firmware_version,
rs::camera_type,
rs::oem_id,
rs::isp_fw_version,
rs::content_version,
rs::module_version,
rs::imager_model_number,
rs::build_date,
rs::calibration_date,
rs::program_date,
rs::focus_alignment_date,
rs::emitter_type,
rs::focus_value,
rs::lens_type,
rs::third_lens_type,
rs::lens_coating_type,
rs::third_lens_coating_type,
rs::lens_nominal_baseline,
rs::third_lens_nominal_baseline
} |
| | Read-only strings that can be queried from the device. More...
|
| enum | rs::capabilities {
rs::depth,
rs::color,
rs::infrared,
rs::infrared2,
rs::fish_eye,
rs::motion_events,
rs::motion_module_fw_update,
rs::adapter_board,
rs::enumeration
} |
| | Specifies various capabilities of a RealSense device. More...
|
| enum | rs::distortion { rs::none = 5,
rs::modified_brown_conrady,
rs::inverse_brown_conrady,
rs::distortion_ftheta
} |
| | Distortion model: defines how pixel coordinates should be mapped to sensor coordinates. More...
|
| enum | rs::event {
rs::event_imu_accel,
rs::event_imu_gyro,
rs::event_imu_depth_cam,
rs::event_imu_motion_cam,
rs::event_imu_g0_sync,
rs::event_imu_g1_sync,
rs::event_imu_g2_sync
} |
| | Source device that triggered specific timestamp event from the motion module. More...
|
| enum | rs::format {
rs::any,
rs::z16,
rs::disparity16,
rs::xyz32f,
rs::yuyv,
rs::rgb8,
rs::bgr8,
rs::rgba8,
rs::bgra8,
rs::y8,
rs::y16,
rs::raw10,
rs::raw16,
rs::raw8
} |
| | Formats: defines how each stream can be encoded. rs_format specifies how a frame is represented in memory (similar to the V4L pixel format). More...
|
| enum | rs::frame_metadata { rs::actual_exposure,
rs::actual_fps
} |
| | Types of value provided from the device with each frame. More...
|
| enum | rs::log_severity {
rs::debug = 0,
rs::info = 1,
rs::warn = 2,
rs::error = 3,
rs::fatal = 4,
rs::none = 5
} |
| | Severity of the librealsense logger. More...
|
| enum | rs::option {
rs::color_backlight_compensation,
rs::color_brightness,
rs::color_contrast,
rs::color_exposure,
rs::color_gain,
rs::color_gamma,
rs::color_hue,
rs::color_saturation,
rs::color_sharpness,
rs::color_white_balance,
rs::color_enable_auto_exposure,
rs::color_enable_auto_white_balance,
rs::f200_laser_power,
rs::f200_accuracy,
rs::f200_motion_range,
rs::f200_filter_option,
rs::f200_confidence_threshold,
rs::f200_dynamic_fps,
rs::sr300_auto_range_enable_motion_versus_range,
rs::sr300_auto_range_enable_laser,
rs::sr300_auto_range_min_motion_versus_range,
rs::sr300_auto_range_max_motion_versus_range,
rs::sr300_auto_range_start_motion_versus_range,
rs::sr300_auto_range_min_laser,
rs::sr300_auto_range_max_laser,
rs::sr300_auto_range_start_laser,
rs::sr300_auto_range_upper_threshold,
rs::sr300_auto_range_lower_threshold,
rs::r200_lr_auto_exposure_enabled,
rs::r200_lr_gain,
rs::r200_lr_exposure,
rs::r200_emitter_enabled,
rs::r200_depth_units,
rs::r200_depth_clamp_min,
rs::r200_depth_clamp_max,
rs::r200_disparity_multiplier,
rs::r200_disparity_shift,
rs::r200_auto_exposure_mean_intensity_set_point,
rs::r200_auto_exposure_bright_ratio_set_point,
rs::r200_auto_exposure_kp_gain,
rs::r200_auto_exposure_kp_exposure,
rs::r200_auto_exposure_kp_dark_threshold,
rs::r200_auto_exposure_top_edge,
rs::r200_auto_exposure_bottom_edge,
rs::r200_auto_exposure_left_edge,
rs::r200_auto_exposure_right_edge,
rs::r200_depth_control_estimate_median_decrement,
rs::r200_depth_control_estimate_median_increment,
rs::r200_depth_control_median_threshold,
rs::r200_depth_control_score_minimum_threshold,
rs::r200_depth_control_score_maximum_threshold,
rs::r200_depth_control_texture_count_threshold,
rs::r200_depth_control_texture_difference_threshold,
rs::r200_depth_control_second_peak_threshold,
rs::r200_depth_control_neighbor_threshold,
rs::r200_depth_control_lr_threshold,
rs::fisheye_exposure,
rs::fisheye_gain,
rs::fisheye_strobe,
rs::fisheye_external_trigger,
rs::fisheye_color_auto_exposure,
rs::fisheye_color_auto_exposure_mode,
rs::fisheye_color_auto_exposure_rate,
rs::fisheye_color_auto_exposure_sample_rate,
rs::fisheye_color_auto_exposure_skip_frames,
rs::frames_queue_size,
rs::hardware_logger_enabled,
rs::total_frame_drops
} |
| | Defines general configuration controls. More...
|
| enum | rs::output_buffer_format { rs::continous,
rs::native
} |
| | Output buffer format: sets how librealsense works with frame memory. More...
|
| enum | rs::preset { rs::best_quality,
rs::largest_image,
rs::highest_framerate
} |
| | Presets: general preferences that are translated by librealsense into concrete resolution and FPS. More...
|
| enum | rs::source { rs::video,
rs::motion_data,
rs::all_sources
} |
| | Allows the user to choose between available hardware subdevices. More...
|
| enum | rs::stream {
rs::depth,
rs::color,
rs::infrared,
rs::infrared2,
rs::fisheye,
rs::points,
rs::rectified_color,
rs::color_aligned_to_depth,
rs::infrared2_aligned_to_depth,
rs::depth_aligned_to_color,
rs::depth_aligned_to_rectified_color,
rs::depth_aligned_to_infrared2
} |
| | Streams are different types of data provided by RealSense devices. More...
|
| enum | rs::timestamp_domain { rs::camera,
rs::microcontroller
} |
| | Specifies the clock in relation to which the frame timestamp was measured. More...
|
Functions |
| void | rs::apply_depth_control_preset (device *device, int preset) |
| void | rs::apply_ivcam_preset (device *device, rs_ivcam_preset preset) |
| void | rs::apply_ivcam_preset (device *device, int preset) |
| void | rs::log_to_callback (log_severity min_severity, std::function< void(log_severity, const char *)> callback) |
| void | rs::log_to_console (log_severity min_severity) |
| void | rs::log_to_file (log_severity min_severity, const char *file_path) |
| std::ostream & | rs::operator<< (std::ostream &o, stream stream) |
| std::ostream & | rs::operator<< (std::ostream &o, format format) |
| std::ostream & | rs::operator<< (std::ostream &o, preset preset) |
| std::ostream & | rs::operator<< (std::ostream &o, distortion distortion) |
| std::ostream & | rs::operator<< (std::ostream &o, option option) |
| std::ostream & | rs::operator<< (std::ostream &o, capabilities capability) |
| std::ostream & | rs::operator<< (std::ostream &o, source src) |
| std::ostream & | rs::operator<< (std::ostream &o, event evt) |
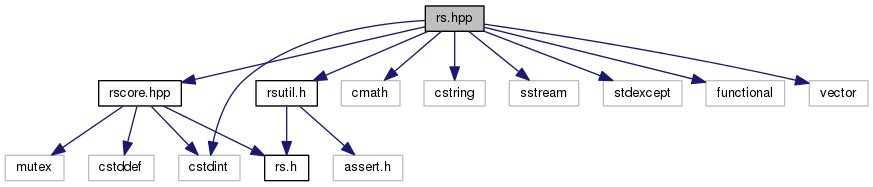
Exposes librealsense functionality for C++ compilers.
Definition in file rs.hpp.