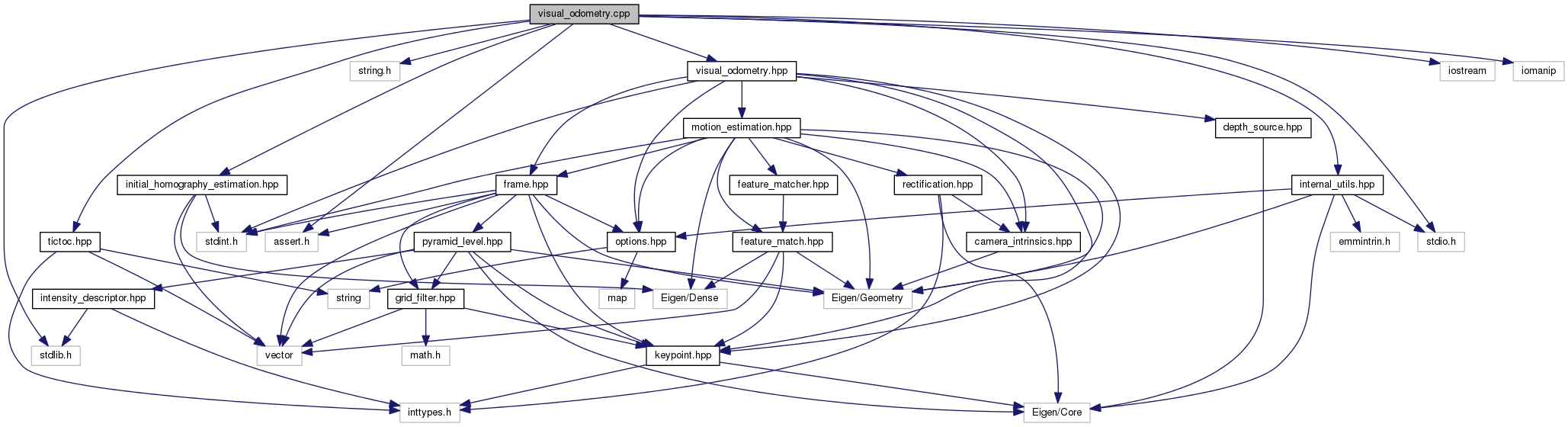
#include <stdio.h>#include <stdlib.h>#include <string.h>#include <assert.h>#include "tictoc.hpp"#include "visual_odometry.hpp"#include "initial_homography_estimation.hpp"#include "internal_utils.hpp"#include <iostream>#include <iomanip>
Include dependency graph for visual_odometry.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | fovis |
quick and dirty profiling tool. inspired by the matlab tic/toc command | |
Defines | |
| #define | dbg(...) |
| #define | dump(var) (std::cerr<<" "#var<<" =[\n"<< std::setprecision (12)<<var<<"]"<<std::endl) |
| #define | MIN(a, b) ((a)<(b) ? (a) : (b)) |
Functions | |
| static std::string | fovis::_toString (double v) |
| static int | fovis::clamp (int val, int minval, int maxval) |
| static void | fovis::validateOptions (const VisualOdometryOptions &options, const VisualOdometryOptions &defaults) |
Define Documentation
| #define dbg | ( | ... | ) |
Definition at line 35 of file visual_odometry.cpp.
| #define dump | ( | var | ) | (std::cerr<<" "#var<<" =[\n"<< std::setprecision (12)<<var<<"]"<<std::endl) |
Definition at line 36 of file visual_odometry.cpp.
| #define MIN | ( | a, | |
| b | |||
| ) | ((a)<(b) ? (a) : (b)) |
Definition at line 39 of file visual_odometry.cpp.