Test of gait generator. More...
Include dependency graph for testGaitGenerator.cpp:
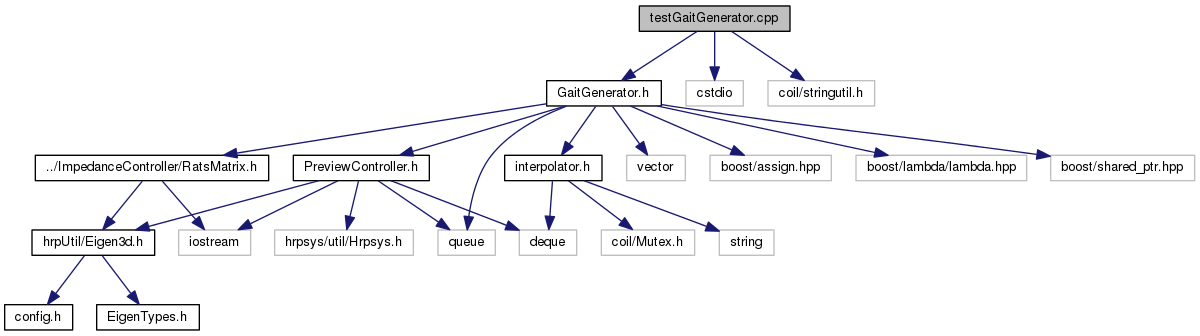
Go to the source code of this file.
Classes | |
| class | testGaitGenerator |
| class | testGaitGeneratorHRP2JSK |
| class | ValueDifferenceChecker< T > |
| class | ValueErrorChecker |
Defines | |
| #define | deg2rad(deg) (deg * M_PI / 180) |
| #define | eps_eq(a, b, epsilon) (std::fabs((a)-(b)) < (epsilon)) |
| #define | rad2deg(rad) (rad * 180 / M_PI) |
| #define | VEC1(s) std::vector<std::string> (1, s) |
Functions | |
| int | main (int argc, char *argv[]) |
| void | print_usage () |
Detailed Description
Test of gait generator.
- Date:
- $Date$
$Id$ TODO Support test of quad walking Support test of foot_dif_angle Support footstep modification using capture point feedback Support TODO in check_end_values Supprot other robots and dt
Definition in file testGaitGenerator.cpp.
Define Documentation
Definition at line 28 of file testGaitGenerator.cpp.
Definition at line 23 of file testGaitGenerator.cpp.
Definition at line 25 of file testGaitGenerator.cpp.
| #define VEC1 | ( | s | ) | std::vector<std::string> (1, s) |
Function Documentation
Definition at line 1404 of file testGaitGenerator.cpp.
| void print_usage | ( | ) |
Definition at line 1373 of file testGaitGenerator.cpp.