#include <hrpModel/Body.h>#include <hrpModel/Link.h>#include <hrpModel/JointPath.h>#include <cmath>#include <coil/stringutil.h>#include <iomanip>
Include dependency graph for JointPathEx.h:
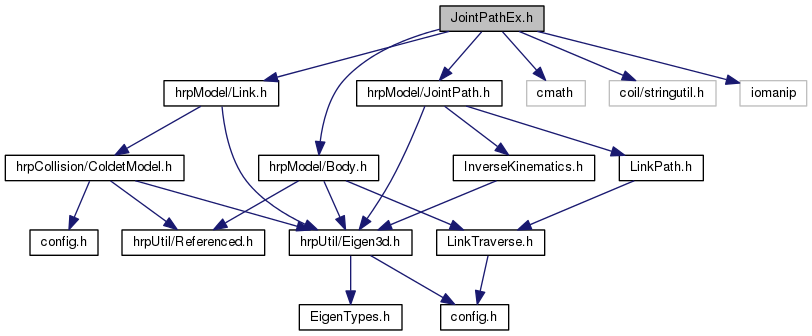
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | hrp::InvDynStateBuffer |
| class | hrp::JointPathEx |
| struct | hrp::VirtualForceSensorParam |
Namespaces | |
| namespace | hrp |
Typedefs | |
| typedef boost::shared_ptr < JointPathEx > | hrp::JointPathExPtr |
Functions | |
| void | hrp::calcAccelerationsForInverseDynamics (const hrp::BodyPtr _m_robot, InvDynStateBuffer &_idsb) |
| void | hrp::calcRootLinkWrenchFromInverseDynamics (hrp::BodyPtr _m_robot, InvDynStateBuffer &_idsb, hrp::Vector3 &_f_ans, hrp::Vector3 &_t_ans) |
| int | hrp::calcSRInverse (const dmatrix &_a, dmatrix &_a_sr, double _sr_ratio, dmatrix _w) |
| void | hrp::calcWorldZMPFromInverseDynamics (hrp::BodyPtr _m_robot, InvDynStateBuffer &_idsb, hrp::Vector3 &_zmp_ans) |
| void | hrp::readInterlockingJointsParamFromProperties (std::vector< std::pair< Link *, Link * > > &pairs, hrp::BodyPtr m_robot, const std::string &prop_string, const std::string &instance_name) |
| void | hrp::readVirtualForceSensorParamFromProperties (std::map< std::string, hrp::VirtualForceSensorParam > &vfs, hrp::BodyPtr m_robot, const std::string &prop_string, const std::string &instance_name) |
| void | hrp::updateInvDynStateBuffer (InvDynStateBuffer &_idsb) |