#include <boost/graph/adjacency_list.hpp>#include <boost/function.hpp>#include "descartes_core/trajectory_pt.h"#include "descartes_trajectory/cart_trajectory_pt.h"#include "descartes_trajectory/joint_trajectory_pt.h"#include <map>#include <vector>
Include dependency graph for planning_graph.h:

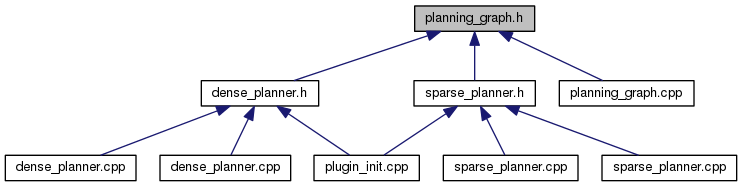
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | descartes_planner::CartesianPointInformation |
| struct | descartes_planner::CartesianPointRelationship |
| struct | descartes_planner::JointEdge |
| struct | descartes_planner::JointVertex |
| class | descartes_planner::PlanningGraph |
Namespaces | |
| namespace | descartes_planner |
Typedefs | |
| typedef std::map < descartes_core::TrajectoryPt::ID, CartesianPointInformation > | descartes_planner::CartesianMap |
| typedef boost::function < double(const std::vector < double > &, const std::vector< double > &)> | descartes_planner::CostFunction |
| typedef boost::graph_traits < JointGraph >::edge_iterator | descartes_planner::EdgeIterator |
| typedef boost::graph_traits < JointGraph > ::in_edge_iterator | descartes_planner::InEdgeIterator |
| typedef boost::adjacency_list < boost::listS, boost::vecS, boost::bidirectionalS, JointVertex, JointEdge > | descartes_planner::JointGraph |
| typedef std::map < descartes_core::TrajectoryPt::ID, descartes_trajectory::JointTrajectoryPt > | descartes_planner::JointMap |
| typedef boost::graph_traits < JointGraph > ::out_edge_iterator | descartes_planner::OutEdgeIterator |
| typedef boost::graph_traits < JointGraph > ::vertex_iterator | descartes_planner::VertexIterator |
| typedef std::map < descartes_core::TrajectoryPt::ID, JointGraph::vertex_descriptor > | descartes_planner::VertexMap |