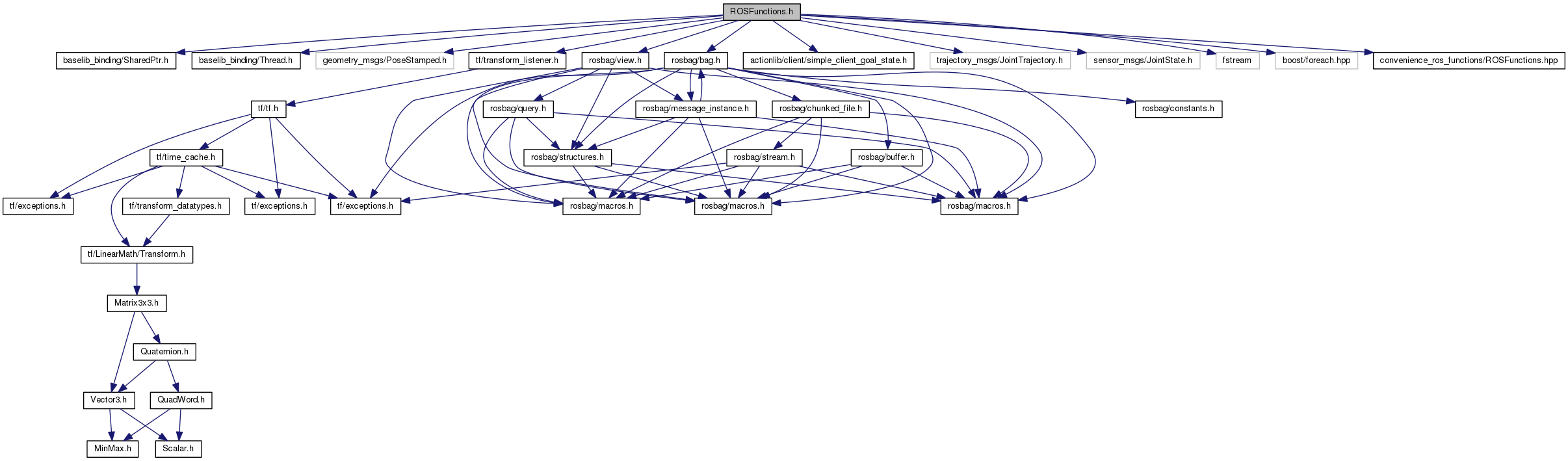
#include <baselib_binding/SharedPtr.h>#include <baselib_binding/Thread.h>#include <geometry_msgs/PoseStamped.h>#include <tf/transform_listener.h>#include <actionlib/client/simple_client_goal_state.h>#include <trajectory_msgs/JointTrajectory.h>#include <sensor_msgs/JointState.h>#include <rosbag/bag.h>#include <rosbag/view.h>#include <fstream>#include <boost/foreach.hpp>#include <convenience_ros_functions/ROSFunctions.hpp>
Include dependency graph for ROSFunctions.h:
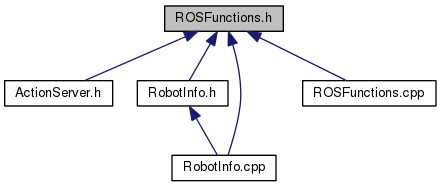
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | convenience_ros_functions::ROSFunctions |
Namespaces | |
| namespace | convenience_ros_functions |
Defines | |
| #define | DEFAULT_TF_CACHE_TIME 15 |
Define Documentation
| #define DEFAULT_TF_CACHE_TIME 15 |
Definition at line 18 of file ROSFunctions.h.