#include <ros/ros.h>#include <stdint.h>#include <unordered_map>#include <shape_msgs/SolidPrimitive.h>#include <visualization_msgs/Marker.h>
Include dependency graph for obstacle_distance_data_types.hpp:

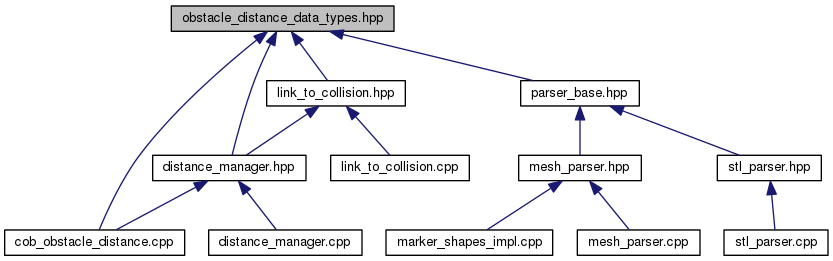
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | ShapeMsgTypeToVisMarkerType |
| struct | TriangleSupport |
Defines | |
| #define | DEFAULT_COL_ALPHA 0.6 |
| #define | FCL_BOX_X 0u |
| #define | FCL_BOX_Y 1u |
| #define | FCL_BOX_Z 2u |
| #define | FCL_CYL_LENGTH 1u |
| #define | FCL_RADIUS 0u |
| #define | MIN_DISTANCE 0.5 |
Variables | |
| static ShapeMsgTypeToVisMarkerType | g_shapeMsgTypeToVisMarkerType |
Define Documentation
| #define DEFAULT_COL_ALPHA 0.6 |
Definition at line 36 of file obstacle_distance_data_types.hpp.
| #define FCL_BOX_X 0u |
Definition at line 27 of file obstacle_distance_data_types.hpp.
| #define FCL_BOX_Y 1u |
Definition at line 28 of file obstacle_distance_data_types.hpp.
| #define FCL_BOX_Z 2u |
Definition at line 29 of file obstacle_distance_data_types.hpp.
| #define FCL_CYL_LENGTH 1u |
Definition at line 32 of file obstacle_distance_data_types.hpp.
| #define FCL_RADIUS 0u |
Definition at line 31 of file obstacle_distance_data_types.hpp.
| #define MIN_DISTANCE 0.5 |
Definition at line 34 of file obstacle_distance_data_types.hpp.
Variable Documentation
Definition at line 65 of file obstacle_distance_data_types.hpp.