#include <ros/ros.h>#include <visualization_msgs/Marker.h>#include <shape_msgs/Mesh.h>#include <shape_msgs/MeshTriangle.h>#include "fcl/shape/geometric_shapes.h"#include "fcl/collision_object.h"#include "cob_obstacle_distance/fcl_marker_converter.hpp"#include "cob_obstacle_distance/marker_shapes/marker_shapes_interface.hpp"#include <fcl/distance.h>#include <fcl/collision_data.h>#include "cob_obstacle_distance/marker_shapes/marker_shapes_impl.hpp"
Include dependency graph for marker_shapes.hpp:

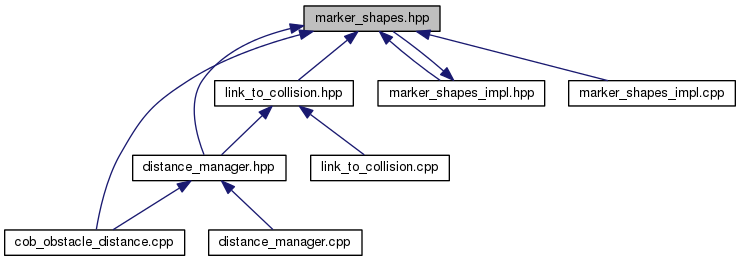
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | MarkerShape< T > |
| Template class implementation for box, sphere and cylinder fcl::shapes. Creates visualization marker. More... | |
| class | MarkerShape< BVH_RSS_t > |
Variables | |
| static const std::string | g_marker_namespace = "collision_object" |
Variable Documentation
const std::string g_marker_namespace = "collision_object" [static] |
Definition at line 35 of file marker_shapes.hpp.